

復(fù)雜地形探測(cè)球形六足機(jī)器人設(shè)計(jì)與控制研究
“優(yōu)秀設(shè)計(jì)”一等獎(jiǎng)
資助企業(yè):
 上海宇航系統(tǒng)工程研究所
上海宇航系統(tǒng)工程研究所
資助年份: 2025
企業(yè)導(dǎo)師: 王衛(wèi)軍

指導(dǎo)教師: 齊臣坤
項(xiàng)目成員: 王晉凱 馬藝琴
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
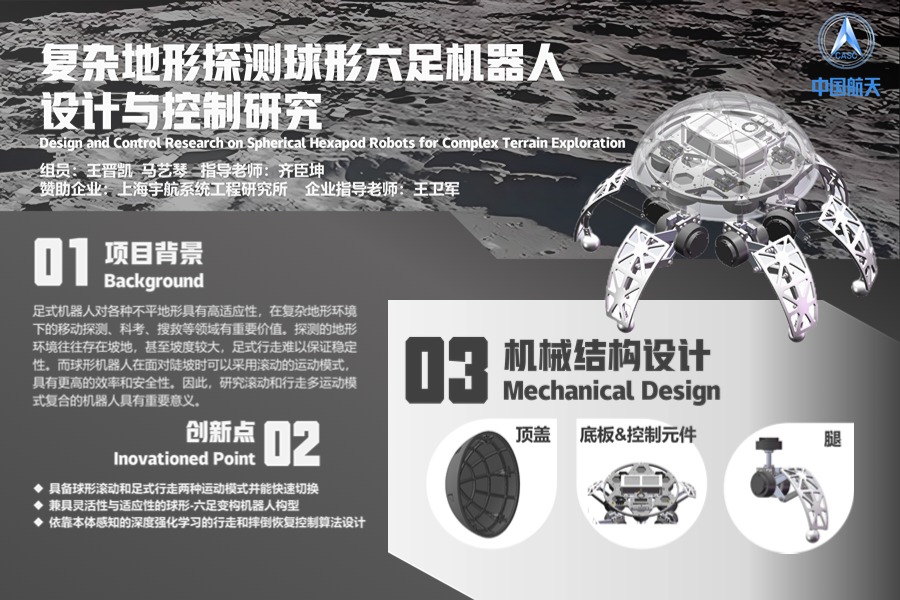
面向我國(guó)月面探測(cè)任務(wù),針對(duì)月面復(fù)雜地形通過(guò)和探測(cè)需求,有必要研究具有復(fù)合移動(dòng)模式的月面探測(cè)小型機(jī)器人。六足爬行、球形滾動(dòng)復(fù)合式機(jī)器人可探測(cè)多種復(fù)雜地形,具備六足爬行模式穩(wěn)定性高、越障性能好、適于崎嶇松軟地形探測(cè)以及球形滾動(dòng)模式沿坡面滾動(dòng)能耗低、速度快的優(yōu)點(diǎn),本項(xiàng)目以此為背景進(jìn)行球形-六足變構(gòu)機(jī)器人的開(kāi)發(fā)。
項(xiàng)目目標(biāo)
本項(xiàng)目聚焦于研發(fā)一款具備六足爬行與球形滾動(dòng)復(fù)合移動(dòng)能力的創(chuàng)新型機(jī)器人,首先需完成多模式運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì):構(gòu)建可切換爬行與滾動(dòng)形態(tài)的六足本體結(jié)構(gòu),通過(guò)關(guān)節(jié)聯(lián)動(dòng)機(jī)構(gòu)實(shí)現(xiàn)足式支撐與球體閉合的形態(tài)轉(zhuǎn)換,兼顧足式運(yùn)動(dòng)的越障靈活性與球形滾動(dòng)的高效移動(dòng)特性。同步進(jìn)行虛擬仿真與驗(yàn)證:利用多體動(dòng)力學(xué)軟件建立機(jī)器人虛擬模型,仿真不同地形下的運(yùn)動(dòng)軌跡、能耗特性及穩(wěn)定性,優(yōu)化機(jī)構(gòu)參數(shù)與控制邏輯。最終需完成物理樣機(jī)研制與實(shí)驗(yàn):集成輕量化機(jī)身、低功耗驅(qū)動(dòng)模塊與自主控制軟件,驗(yàn)證復(fù)合移動(dòng)模式的可靠性。
項(xiàng)目成果
(1)完成六足爬行、球形滾動(dòng)復(fù)合式機(jī)器人機(jī)械設(shè)計(jì),包括移動(dòng)機(jī)構(gòu)和結(jié)構(gòu)設(shè)計(jì),開(kāi)展移動(dòng)模式仿真,進(jìn)行機(jī)構(gòu)和結(jié)構(gòu)優(yōu)化,獲得驅(qū)動(dòng)電機(jī)參數(shù)并完成選型。(2)完成六足爬行、球形滾動(dòng)復(fù)合式機(jī)器人控制設(shè)計(jì),包括控制硬件、算法和軟件設(shè)計(jì),開(kāi)展機(jī)器人控制仿真,提出適用于復(fù)合移動(dòng)模式的機(jī)器人運(yùn)動(dòng)控制算法,包含六足爬行模式的移動(dòng)控制、球形滾動(dòng)模式的移動(dòng)控制等。(3)研制出六足爬行、球形滾動(dòng)復(fù)合式機(jī)器人樣機(jī)1臺(tái),開(kāi)發(fā)出控制軟件1套,開(kāi)展實(shí)驗(yàn)驗(yàn)證研究,驗(yàn)證機(jī)器人的功能和性能,完成研究報(bào)告1份。




