

面向深腔檢測的超冗余度機器人作業(yè)系統(tǒng)開發(fā)
“優(yōu)秀設(shè)計”二等獎
資助企業(yè):
 海安上海交通大學智能裝備研究院
海安上海交通大學智能裝備研究院
資助年份: 2023
企業(yè)導師: 周恩權(quán)

指導教師: 谷國迎
項目成員: 彭湛軒、孫佳寧、朱真璞
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
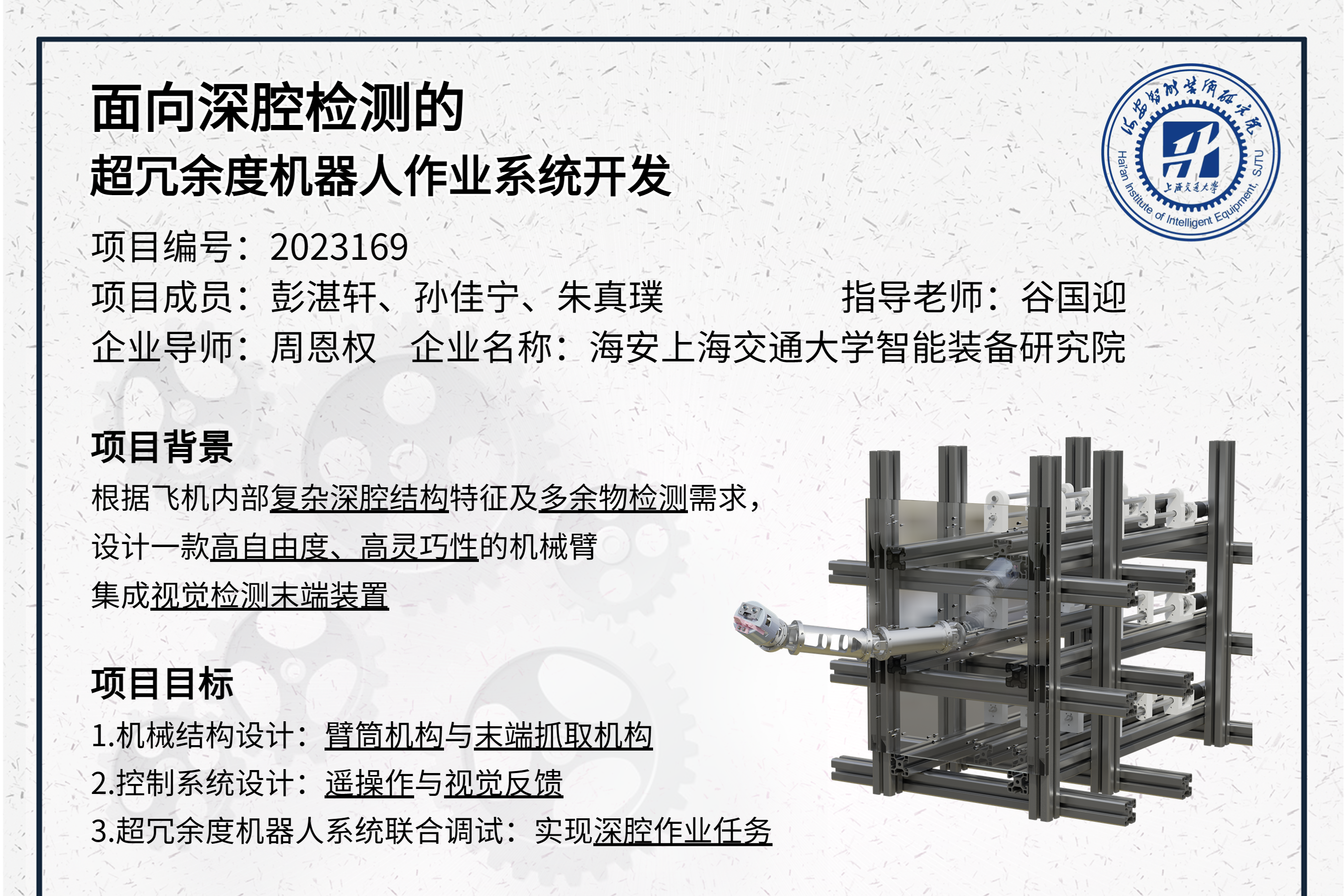
在飛機制造和裝配復雜深腔構(gòu)件時,易產(chǎn)生切屑、螺釘?shù)榷嘤辔铮瑢\行安全構(gòu)成威脅。每年因多余物導致的飛機故障約占故障總數(shù)的1.5%左右,成為低層次質(zhì)量事故的重要原因。但由于深腔結(jié)構(gòu)復雜、狹窄、弱/無光、封閉、多障礙的特點,傳統(tǒng)工業(yè)機器人無法進入,難以對多余物進行檢測。因此,需要一種高自由度、高靈巧性的機器人系統(tǒng),能夠檢測和拾取在深腔結(jié)構(gòu)中的物品。本項目旨在開發(fā)這樣的超冗余度機器人系統(tǒng),以實現(xiàn)深腔環(huán)境的檢測和多余物拾取。
項目目標
本項目工作主要分為機械臂臂筒機構(gòu)優(yōu)化設(shè)計、末端抓取機構(gòu)與視覺傳感系統(tǒng)的集成、以及驅(qū)動裝置與控制系統(tǒng)開發(fā)三個部分,并進行整合集成。項目總體設(shè)計目標包括:完成臂筒機構(gòu)設(shè)計,優(yōu)化已有蛇形機械臂的驅(qū)動性能;完成末端抓取裝置與視覺傳感器的集成化設(shè)計,使蛇形機械臂具備末端狀態(tài)傳感與抓取遺落物的能力;完成驅(qū)動裝置的設(shè)計與控制系統(tǒng)的集成,使蛇形機械臂具有一定的驅(qū)動能力;進行超冗余度機器人系統(tǒng)聯(lián)合調(diào)試,最終實現(xiàn)系統(tǒng)集成和深腔作業(yè)任務(wù)實現(xiàn)。
項目成果
本項目實現(xiàn)了以下成果:蛇形機械臂臂筒機構(gòu)優(yōu)化能夠解決驅(qū)動繩快速拆裝問題,并實現(xiàn)輕量化設(shè)計,使得臂體具有更高的機構(gòu)強度、更好的可加工性和可維修性。蛇形機械臂末端裝置能夠進行更為集成化、小型化、輕質(zhì)化的設(shè)計,提高蛇形機械臂的靈巧性、承載能力,同時實現(xiàn)如遺落物抓取、雙目測距等多項工作。模塊化架構(gòu)解決了安裝便捷性和經(jīng)濟性方面的不足,對力學信息、視覺信息進行了集成化分析處理,提升多余物夾取的效率與成功率。




