

基于視觸覺傳感器的機(jī)器人柔性線纜感知與操作
“優(yōu)秀設(shè)計”二等獎
資助企業(yè):
 寧德時代未來能源(上海)研究院
寧德時代未來能源(上海)研究院
資助年份: 2025
企業(yè)導(dǎo)師: 石培昊

指導(dǎo)教師: 谷國迎
項目成員: 劉朕樂 魏業(yè)勛 陳樂凱
 項目海報
項目海報


 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
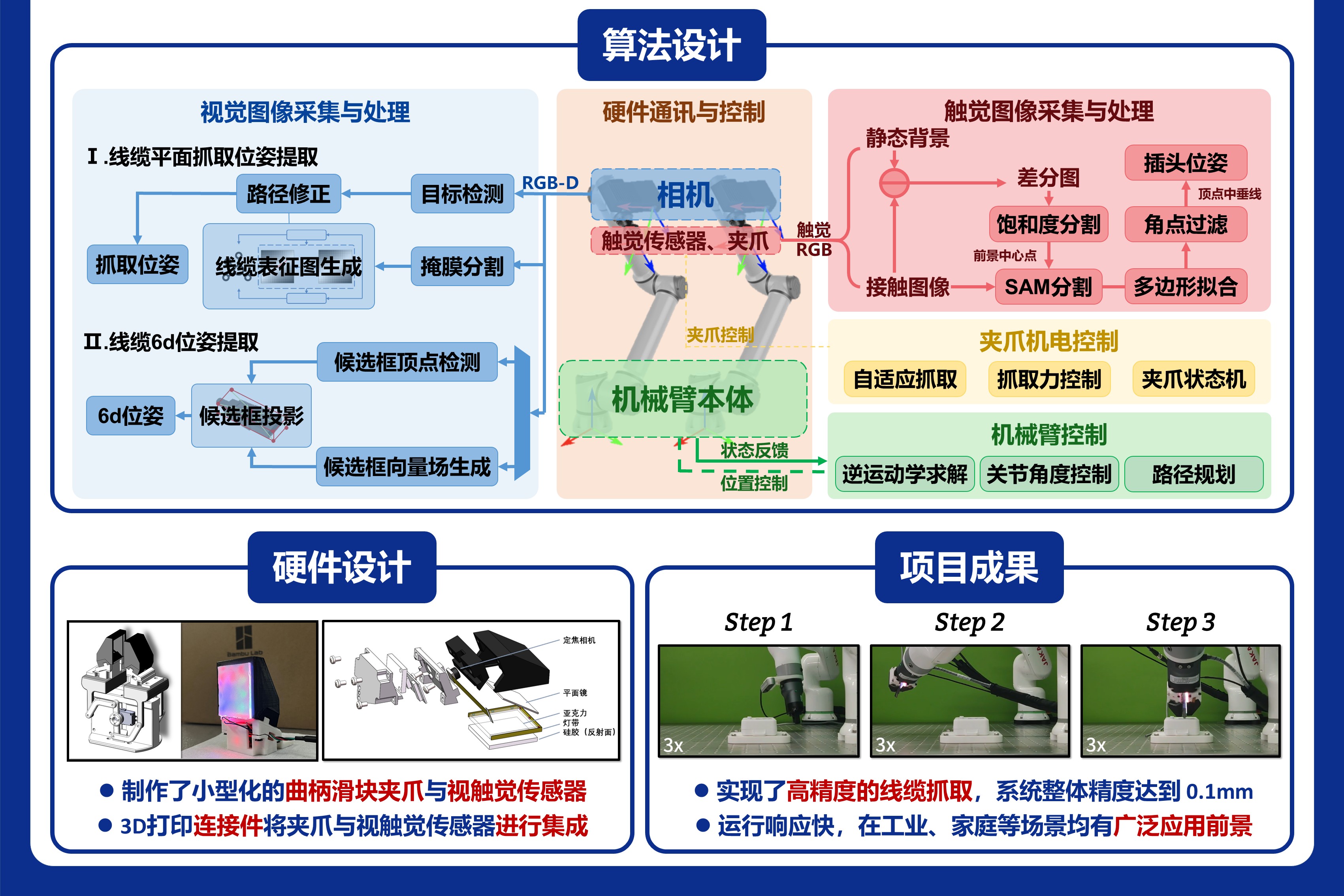
本項目針對工業(yè)自動化中柔性線纜的精確操作難題,提出了一套基于視觸覺傳感器的機(jī)器人感知與操控系統(tǒng),旨在實現(xiàn)線纜的高精度定位、抓取及插接。傳統(tǒng)工業(yè)機(jī)器人難以適應(yīng)線纜的柔性形變和復(fù)雜環(huán)境干擾,本項目通過融合視覺與觸覺感知、深度學(xué)習(xí)算法及雙臂協(xié)同控制,構(gòu)建了完整的自動化解決方案。系統(tǒng)采用定制化視觸覺傳感實時監(jiān)測線纜形變,并結(jié)合魯棒控制策略確保穩(wěn)定操作。研究覆蓋了從傳感器設(shè)計、位姿估計算法到機(jī)電系統(tǒng)集成的全流程,適用于電池制造、汽車線束裝配等場景,為柔性物體自動化操作提供了創(chuàng)新性技術(shù)路徑。
項目目標(biāo)
(1)高精度感知:開發(fā)小體積、高靈敏度的視觸覺傳感器,精確感知線纜插頭的位姿和插座的位置;
(2)智能操控算法:基于深度學(xué)習(xí)提升線纜在雜亂環(huán)境中的識別成功率(> 90%),并設(shè)計自適應(yīng)插接控制策略(插接成功率> 70%);
(3)機(jī)電系統(tǒng)集成:優(yōu)化夾爪結(jié)構(gòu)與雙臂協(xié)同架構(gòu),滿足狹小空間作業(yè)需求(如電池模組內(nèi)部線纜插接),最終構(gòu)建可部署的工業(yè)級原型系統(tǒng)。項目同時注重技術(shù)通用性,確保方案可擴(kuò)展至其他柔性物體操作任務(wù)。
項目成果
(1)制作了結(jié)構(gòu)簡單,小型化,適合線纜夾取操作的曲柄滑塊夾爪,研制了集成平面鏡光路的視觸覺傳感器;
(2)在不同的線纜初始位置和形狀下均能穩(wěn)定地抓取線纜;
(3)能夠準(zhǔn)確地進(jìn)行6D位姿估計與空間線纜端頭抓取;
(4)實現(xiàn)了手內(nèi)插頭位姿識別,并在不同的插頭位姿下均實現(xiàn)了準(zhǔn)確的自動化插接。




