

面向空間機(jī)器人的智能三維視觸覺傳感器
“優(yōu)秀設(shè)計(jì)”三等獎(jiǎng)
資助企業(yè):
 湖南郎靈科技有限公司
湖南郎靈科技有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 王金行

指導(dǎo)教師: 胡開明
項(xiàng)目成員: 向芮伽 馮世威 張璐瑤
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目概述
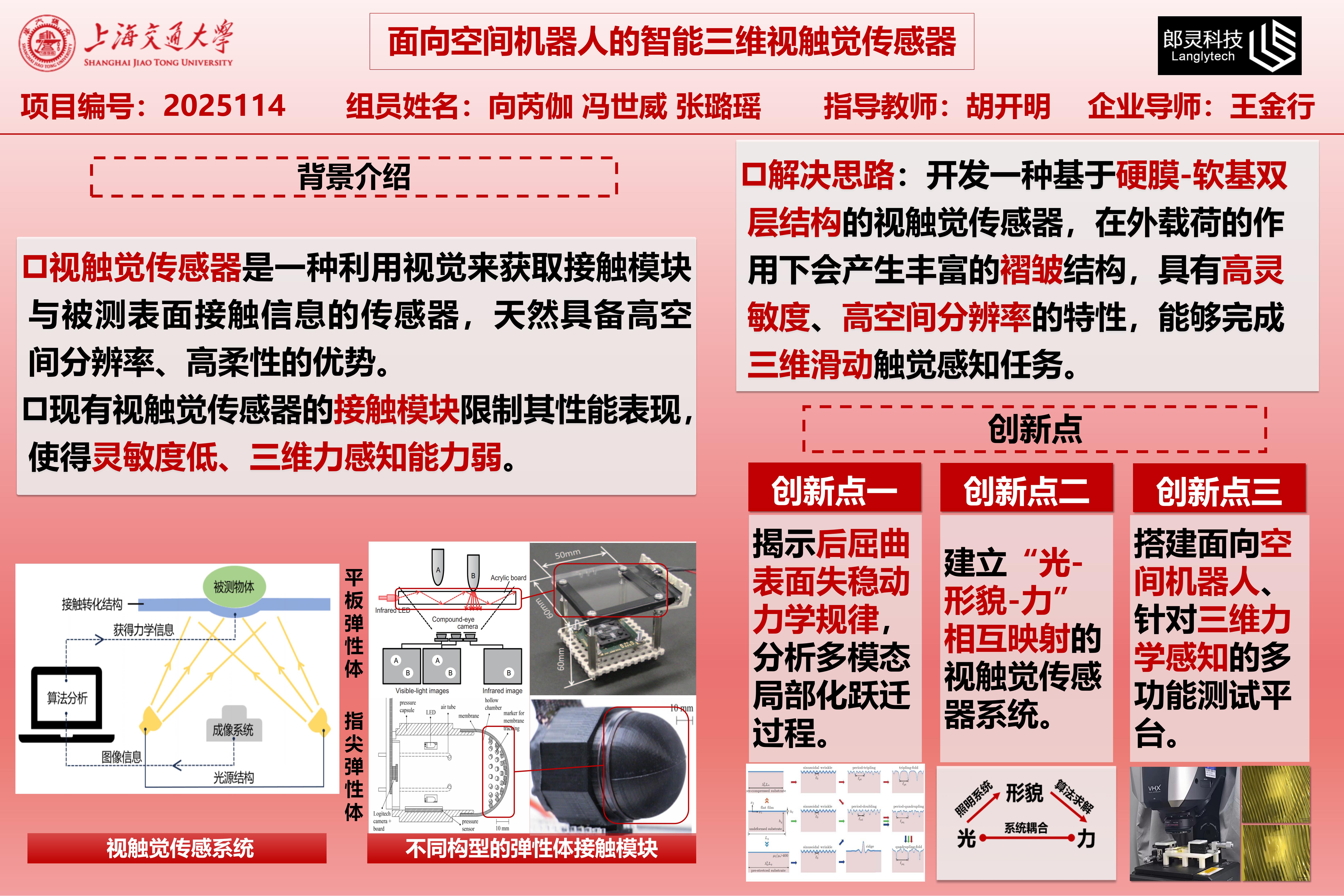
現(xiàn)代航天領(lǐng)域中,空間機(jī)器人因承擔(dān)空間站維護(hù)、衛(wèi)星檢修及太空碎片清理等任務(wù),亟需具備高精度三維觸覺感知能力以應(yīng)對(duì)非合作目標(biāo)的復(fù)雜交互。然而,現(xiàn)有觸覺傳感器在空間分辨率、柔性曲面適應(yīng)性與三維力學(xué)解耦方面仍存在明顯不足。為此,本項(xiàng)目提出基于表面失穩(wěn)力學(xué)自組裝微納結(jié)構(gòu)的新型三維視觸覺傳感器,通過雙層膜基系統(tǒng)的褶皺動(dòng)態(tài)響應(yīng)實(shí)現(xiàn)高靈敏度、高空間分辨率的觸覺感知,其特有的屈曲變形機(jī)制可有效適應(yīng)復(fù)雜曲面的三維滑觸力檢測需求。
項(xiàng)目目標(biāo)
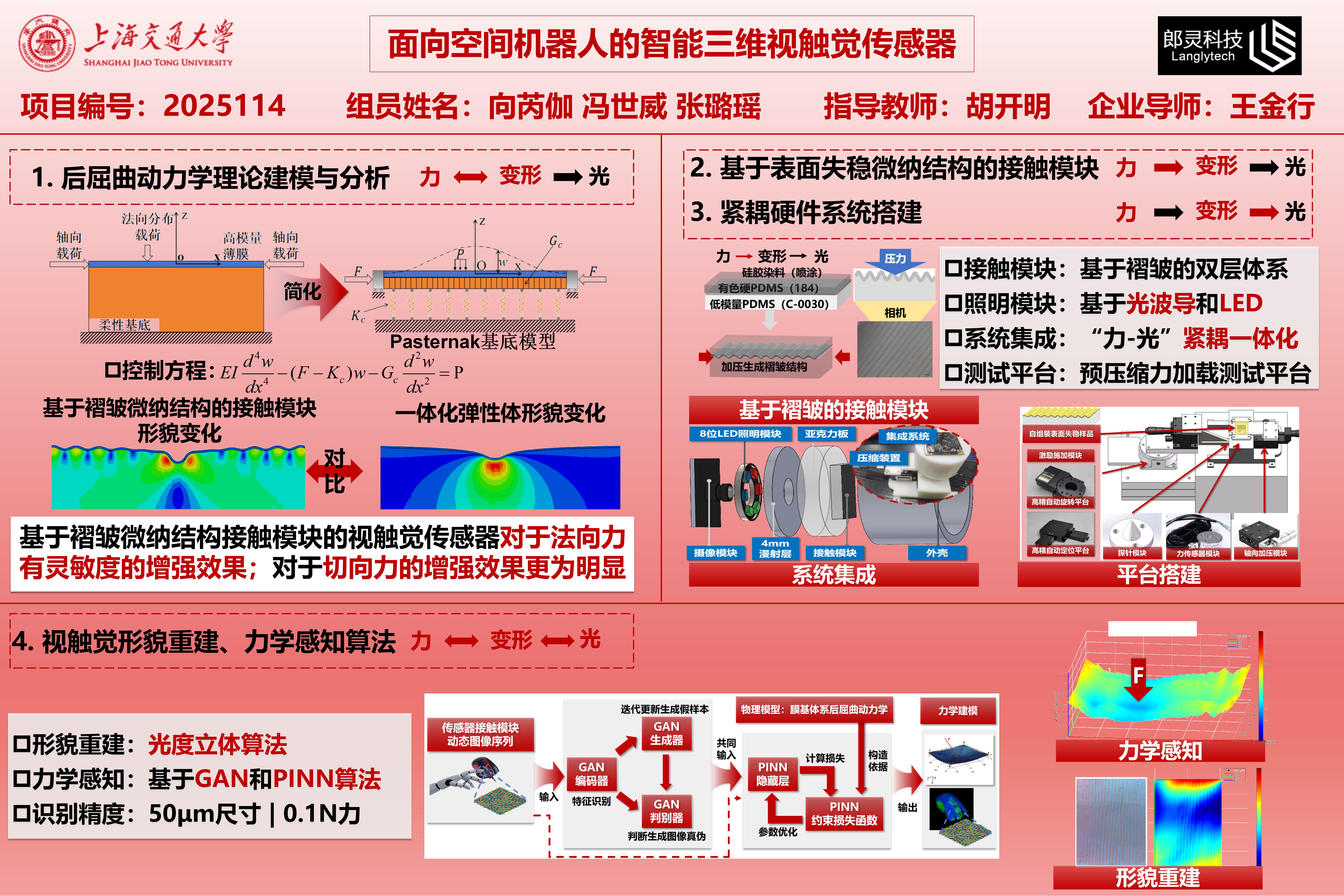
理論分析建模部分是傳感器搭建前的理論基礎(chǔ),研究失穩(wěn)微納結(jié)構(gòu)的多模態(tài)躍遷數(shù)值模擬分析和失穩(wěn)動(dòng)力學(xué)分析為視觸覺傳感器提供基礎(chǔ)支撐;接觸模塊是傳感系統(tǒng)核心,設(shè)計(jì)好光路與攝像的集成也是項(xiàng)目的難點(diǎn)所在;感知算法需要高效率處理攝像模塊的復(fù)雜圖像并完成褶皺三維結(jié)構(gòu)的識(shí)別和力學(xué)感知分析。所設(shè)計(jì)的傳感器系統(tǒng)整體應(yīng)滿足各項(xiàng)應(yīng)用指標(biāo),具備較好的高空間分辨率和靈敏度,并能完成若干工程環(huán)境下的具體任務(wù)。
項(xiàng)目成果
本項(xiàng)目建立了三維滑動(dòng)接觸下膜基系統(tǒng)后屈曲靜力學(xué)和動(dòng)力學(xué)理論模型,結(jié)合有限元仿真與微納壓痕實(shí)驗(yàn)揭示應(yīng)變能主導(dǎo)的多模態(tài)躍遷規(guī)律。其次集成了RGB光波導(dǎo)照明與攝像模塊的視觸覺系統(tǒng),利用褶皺形變的光學(xué)編碼特性實(shí)現(xiàn)接觸力的多維度解析。開發(fā)了基于GAN和PINN的觸覺力重構(gòu)算法,通過耦合理論模型與實(shí)驗(yàn)數(shù)據(jù)實(shí)現(xiàn)三維接觸力的高精預(yù)測。研究突破傳統(tǒng)傳感器剛性結(jié)構(gòu)限制,創(chuàng)新性地將力學(xué)失穩(wěn)轉(zhuǎn)化為感知優(yōu)勢,設(shè)計(jì)可擴(kuò)展應(yīng)用于空間機(jī)器人末端執(zhí)行器,為在軌服務(wù)的自主化升級(jí)提供核心技術(shù)支撐。
本項(xiàng)目正在撰寫SCI論文1篇、國家發(fā)明專利2項(xiàng)。




