

模塊化剛軟外骨骼機(jī)器人
“優(yōu)秀設(shè)計(jì)”優(yōu)勝獎(jiǎng)
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 孫亮

指導(dǎo)教師: 費(fèi)燕瓊
項(xiàng)目成員: 吳非凡 許辰 李育陽 郭俊茜
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目視頻
項(xiàng)目簡介
項(xiàng)目概述
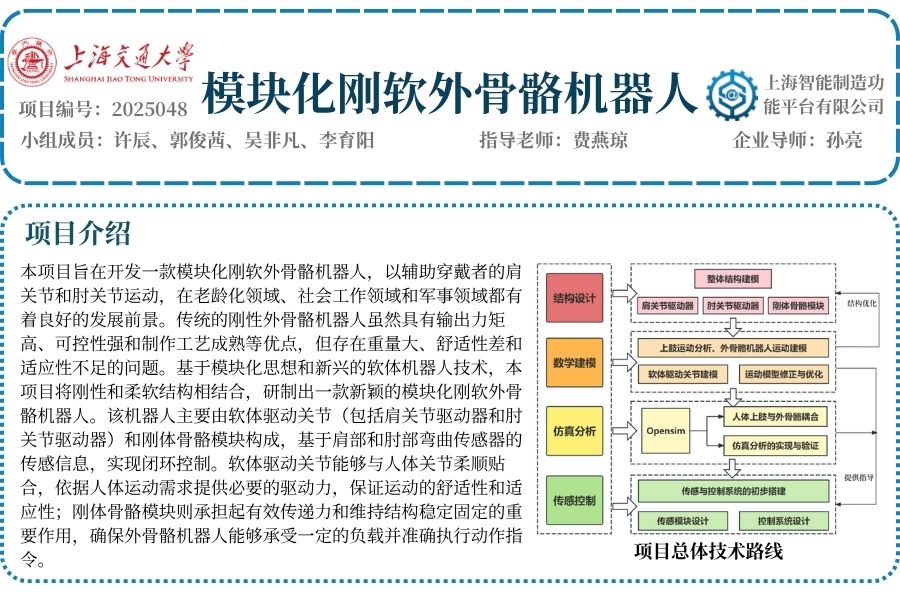
隨著科技的不斷進(jìn)步,外骨骼機(jī)器人作為一種新型的可穿戴設(shè)備,不僅能夠?yàn)槿梭w提供保護(hù)支撐,還可以提升運(yùn)動能力,在老齡化護(hù)理、工業(yè)輔助以及醫(yī)療康復(fù)等領(lǐng)域具有廣泛應(yīng)用。
在實(shí)際應(yīng)用中,傳統(tǒng)的剛性外骨骼機(jī)器人重量大、舒適性差和適應(yīng)性不足的問題逐漸凸顯。而柔性外骨骼憑借其采用的柔性執(zhí)行器,在人機(jī)交互性方面表現(xiàn)出色,能有效避免結(jié)構(gòu)和人體轉(zhuǎn)動中心錯(cuò)位,減少肌肉消耗和代謝成本。同時(shí),由于柔性材料具有良好的柔韌性、可塑性以及緩沖吸振性能,柔性執(zhí)行器能更好地模擬人體肌肉運(yùn)動特性,降低外骨骼運(yùn)動對人體的沖擊力。
項(xiàng)目目標(biāo)
制作肩、肘關(guān)節(jié)剛軟外骨骼,實(shí)現(xiàn)對肢體有效的力矩輸出,從而可以在康復(fù)乃至更多領(lǐng)域發(fā)揮作用;實(shí)現(xiàn)協(xié)調(diào)控制,使各模塊既能獨(dú)立執(zhí)行特定動作,滿足多樣化的功能需求,又能協(xié)調(diào)配合,模擬人體自然的肩、肘關(guān)節(jié)運(yùn)動模式,為穿戴者提供高效、自然的運(yùn)動輔助。
項(xiàng)目成果
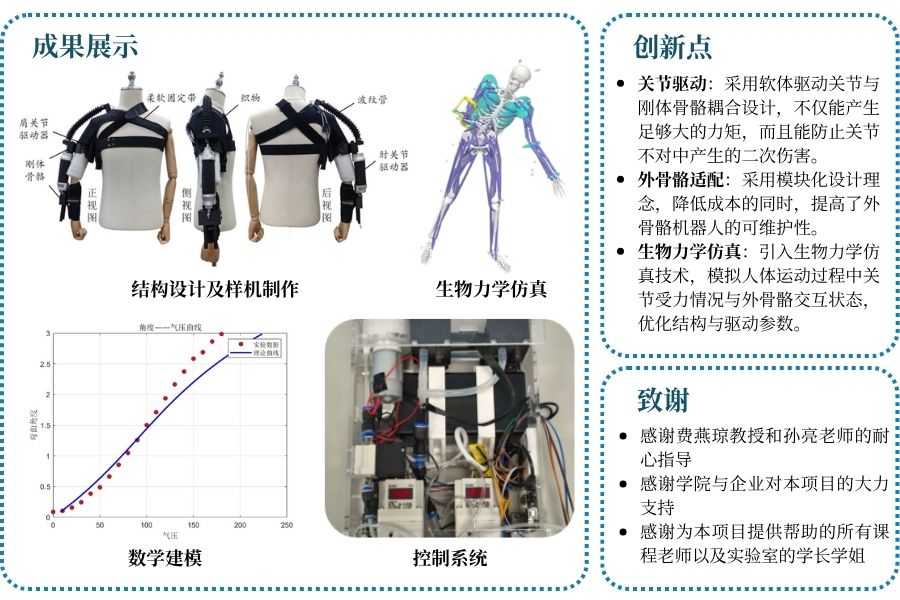
制作了模塊化剛軟外骨骼機(jī)器人樣機(jī),實(shí)現(xiàn)了外骨骼按照規(guī)定路徑的運(yùn)動控制以及鏡像控制,并且結(jié)合力學(xué)理論以及仿真軟件驗(yàn)證了方案的可靠性與優(yōu)越性。




