

基于主動識別技術的智能化醫(yī)療設備人工交互方案
“優(yōu)秀設計”優(yōu)勝獎
資助企業(yè):
 上海聯(lián)影醫(yī)療科技股份有限公司
上海聯(lián)影醫(yī)療科技股份有限公司
資助年份: 2025
企業(yè)導師: 孫宜興

指導教師: 陳曉軍
項目成員: 葉宇帆、林洲誼、張一衡
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
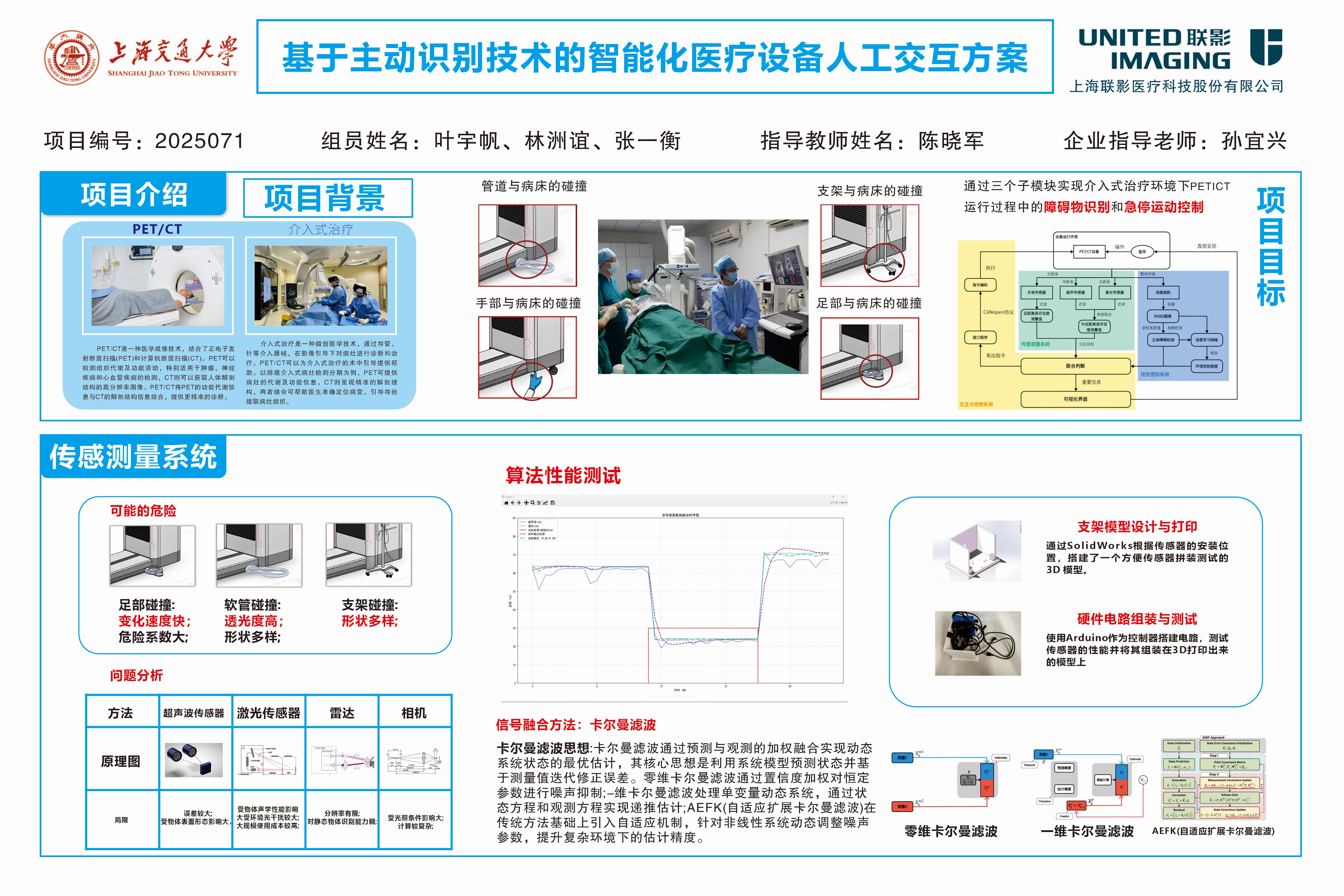
本畢業(yè)設計項目基于PET/CT設備在臨床介入操作中存在的典型安全問題——設備移動路徑與醫(yī)護人員或患者支撐結構之間可能產(chǎn)生碰撞風險。考慮到常規(guī)硬件系統(tǒng)在感知透明物、近距離物體等方面的局限,我們嘗試搭建一套多傳感器融合系統(tǒng),結合了光電、激光、超聲等不同類型傳感器,覆蓋大范圍的感知區(qū)間。此外,系統(tǒng)還引入了雙目深度相機,并圍繞RGB-D數(shù)據(jù)設計了前景分割和遮擋剔除算法,主要解決支撐結構等非危險目標的誤識別問題。在控制層,通過CANopen協(xié)議完成與底層伺服的通訊控制,結合人機界面,形成完整的感知—決策—執(zhí)行閉環(huán)。整個系統(tǒng)在聯(lián)影的實際測試平臺上完成驗證,系統(tǒng)性能穩(wěn)定,滿足對識別率、避撞率等多個關鍵指標的要求。
項目目標
項目的初衷是面向實際臨床環(huán)境中PET/CT設備與醫(yī)護人員共處的復雜場景,希望構建一套能夠主動感知外部障礙物、及時做出避障策略并控制設備行為的交互系統(tǒng)。最初的設想是通過傳感器覆蓋不同距離段,再結合視覺信息提升識別精度。同時,為解決醫(yī)療環(huán)境中部分目標無法建模、部分結構存在透明材質等問題,我們設計了融合深度信息的圖像分割策略,用于特定區(qū)域的屏蔽。除感知與識別之外,系統(tǒng)還需要具備較高的實時性與響應能力,因此控制層要求支持平穩(wěn)制動與精細調(diào)速,并與上層感知結果實時聯(lián)動。此外,考慮實際使用者多為非工程專業(yè)背景的醫(yī)護人員,系統(tǒng)在人機交互界面上也進行了適當簡化和可視化設計。總的來說,我們試圖構建一個兼具功能性、安全性與可用性的原型系統(tǒng)。
項目成果
項目最終實現(xiàn)了一套集感知、識別、交互與控制于一體的智能避障系統(tǒng),并在真實醫(yī)療設備上完成了部署與驗證,體現(xiàn)出優(yōu)異的系統(tǒng)性能和應用前景。在感知層面,項目成功集成光電、激光和超聲波三類傳感器,形成覆蓋近遠距離的多模態(tài)障礙檢測網(wǎng)絡,結合深度相機提供的RGB-D信息,實現(xiàn)對復雜醫(yī)療場景中透明或非規(guī)則障礙物的穩(wěn)定識別。在算法方面,團隊自主提出融合RGB-D信息的輕量化圖像分割模型SUNet-D,并配套設計雙階段立體框障礙檢測策略,實現(xiàn)對患者支撐結構的精準識別與自動屏蔽,極大提高了系統(tǒng)整體識別精度與穩(wěn)定性。在控制與交互方面,開發(fā)了基于PySide6的圖形化人機界面,并完成與底層CANopen總線通信協(xié)議的集成,實現(xiàn)對伺服電機的有效控制與制動響應。系統(tǒng)已通過在聯(lián)影醫(yī)療平臺上的實機聯(lián)調(diào),達到了制動平穩(wěn)、安全防護可靠、用戶交互友好等多項性能指標,為后續(xù)醫(yī)療場景中智能化交互系統(tǒng)的推廣應用奠定了堅實基礎。




