

大氣驅(qū)動機械臂設(shè)計與功能驗證
最佳展示獎
資助企業(yè):
 上海伶機智能科技有限公司
上海伶機智能科技有限公司
資助年份: 2023
企業(yè)導(dǎo)師: 張茂勝

指導(dǎo)教師: 楊斌堂
項目成員: 王濱雁 林郁欣 張薺文
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
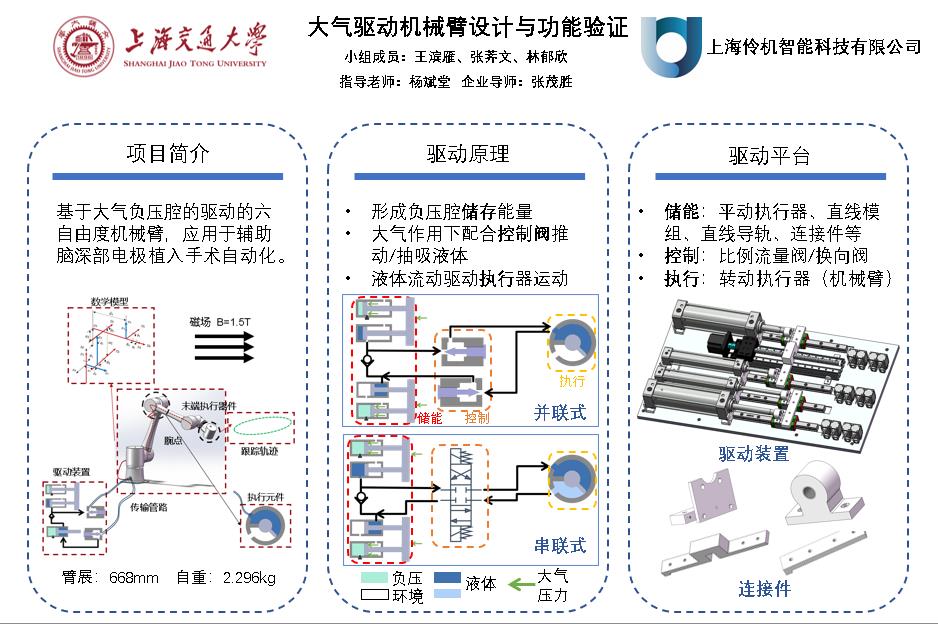
神經(jīng)外科是一門高、精、尖學(xué)科,伴隨著高質(zhì)量的神經(jīng)外科醫(yī)療服務(wù)需求的快速上升,用作手術(shù)輔助的精密機械臂成為熱點。雖然機械傳動的機械臂已經(jīng)發(fā)展至成熟階段,在精度、承載力方面有著突出的優(yōu)勢,但磁性金屬材料的使用并不適用輔助如腦深部電極植入手術(shù)這類核磁環(huán)境下手術(shù)的全自動化。機械傳動間隙產(chǎn)生碰撞和摩擦帶來了作業(yè)過程中的振動、噪音及精度的限制。本項目的主要目標(biāo)是設(shè)計和開發(fā)一款具備高精度、快響應(yīng)、小尺寸、適應(yīng)核磁環(huán)境工作等特點的腦深部電極植入手術(shù)輔助機械臂,創(chuàng)新設(shè)計基于大氣負(fù)壓腔的驅(qū)動系統(tǒng),并對其進(jìn)行功能驗證。
項目目標(biāo)
在(負(fù)壓驅(qū)動關(guān)節(jié))專利的基礎(chǔ)上對大氣/負(fù)壓驅(qū)動方式進(jìn)行分析與建模,創(chuàng)新設(shè)計基于該驅(qū)動方式的機械臂驅(qū)動關(guān)節(jié),并搭建實驗平臺進(jìn)行原理驗證。
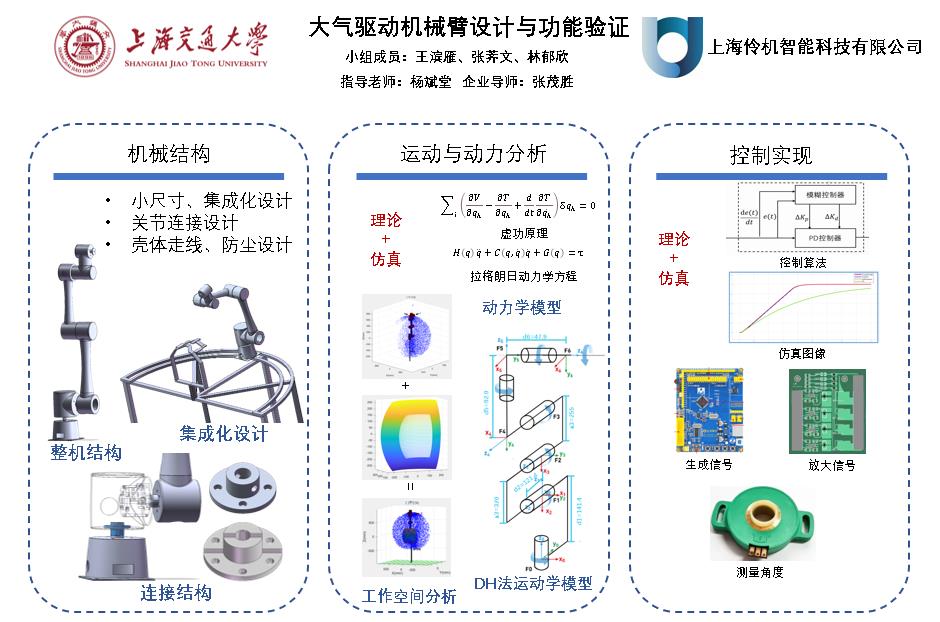
其次對機械臂結(jié)構(gòu)進(jìn)行設(shè)計建模,通過建立數(shù)學(xué)模型及仿真的方式對機械臂運動學(xué)動力學(xué)進(jìn)行分析與驗證,隨后針對具體應(yīng)用場景對目標(biāo)工作空間及可達(dá)工作空間仿真分析。
最后在搭建樣機的基礎(chǔ)上對機械臂路徑規(guī)劃進(jìn)行控制。
項目成果
建立了大氣驅(qū)動的數(shù)學(xué)模型,基于數(shù)學(xué)模型的分析設(shè)計搭建了驅(qū)動裝置,主要包括儲能、控制、執(zhí)行三個部分。在該裝置上實現(xiàn)了“并聯(lián)”、“串聯(lián)”兩種方式來利用儲存的負(fù)壓能量,以驅(qū)動轉(zhuǎn)動執(zhí)行元件運動,最終實現(xiàn)了六自由度轉(zhuǎn)動執(zhí)行元件的驅(qū)動。
根據(jù)工作空間分析、機械校核、動力分析等對機械臂尺寸、結(jié)構(gòu)等進(jìn)行多輪迭代優(yōu)化,滿足目標(biāo)工作空間要求且實現(xiàn)小尺寸與集成設(shè)計,對于運動、動力學(xué)分別通過建立機械臂系統(tǒng)的數(shù)學(xué)模型及搭建仿真系統(tǒng)相互驗證。
利用stm32單片機輸出PWM信號分別控制12路閥門的通斷情況,利用電位器式角度傳感器測量閥門打開時擺動缸的角度變化,結(jié)合控制算法實現(xiàn)了單關(guān)節(jié)閉環(huán)控制,并比較不同輸入PWM信號占空比下對應(yīng)單關(guān)節(jié)轉(zhuǎn)動速度的變化。在通斷閥系統(tǒng)下利用控制輸入信號的時長實現(xiàn)機械臂關(guān)節(jié)的正反向轉(zhuǎn)動控制,通過改變角度的方式調(diào)整機械臂的位姿。




