

硬磁驅(qū)動(dòng)血管介入機(jī)器人
最佳展示獎(jiǎng)
資助企業(yè):
 北京術(shù)銳技術(shù)有限公司
北京術(shù)銳技術(shù)有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 陳煜陽(yáng)

指導(dǎo)教師: 徐凱
項(xiàng)目成員: 劉虹妤,夏乾駿,李睿
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
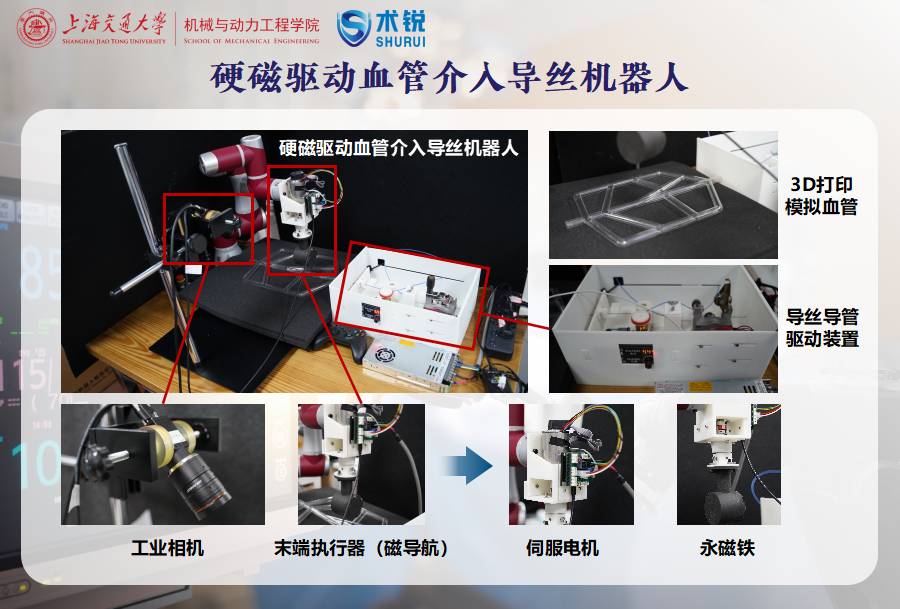
本項(xiàng)目設(shè)計(jì)并研發(fā)了一套基于硬磁驅(qū)動(dòng)的微型導(dǎo)絲機(jī)器人系統(tǒng),通過(guò)電機(jī)驅(qū)動(dòng)控制導(dǎo)絲的推進(jìn)與收回,通過(guò)機(jī)械臂控制永磁鐵改變導(dǎo)絲運(yùn)動(dòng)方向,實(shí)現(xiàn)導(dǎo)絲導(dǎo)管在血管中的可控運(yùn)動(dòng);基于視覺識(shí)別結(jié)果,對(duì)機(jī)械臂進(jìn)行軌跡規(guī)劃,實(shí)現(xiàn)機(jī)械臂與導(dǎo)絲機(jī)器人協(xié)同運(yùn)動(dòng)控制;通過(guò)研發(fā)基于機(jī)械臂控制的硬磁導(dǎo)絲機(jī)器人的軟件平臺(tái),為使用者提供一個(gè)簡(jiǎn)潔直觀、易于使用的控制界面。最后進(jìn)行手術(shù)原理驗(yàn)證,測(cè)試導(dǎo)絲機(jī)器人在體外復(fù)雜腔道內(nèi)運(yùn)動(dòng),并能夠應(yīng)用于醫(yī)學(xué)試驗(yàn)及手術(shù)過(guò)程。
項(xiàng)目目標(biāo)
本項(xiàng)目期望提高血管介入機(jī)器人的自主性、運(yùn)動(dòng)精確度,同時(shí)完成閉環(huán)的跟蹤控制,提高VIS手術(shù)成功率,降低醫(yī)生的輻射暴露風(fēng)險(xiǎn)。具體體現(xiàn)為:設(shè)計(jì)硬磁導(dǎo)絲的結(jié)構(gòu),使其尖端具有硬磁性,能在機(jī)械臂控制磁鐵引導(dǎo)下完成定向彎曲和定向行進(jìn)目標(biāo);設(shè)計(jì)面向心血管介入手術(shù)場(chǎng)景的導(dǎo)絲導(dǎo)管驅(qū)動(dòng)裝置,實(shí)現(xiàn)導(dǎo)絲導(dǎo)管的獨(dú)立雙向驅(qū)動(dòng)和在分叉血管中方向選擇與導(dǎo)絲伸出動(dòng)作;利用機(jī)器學(xué)習(xí)算法對(duì)導(dǎo)絲尖端進(jìn)行圖像識(shí)別,并基于識(shí)別結(jié)果對(duì)機(jī)械臂進(jìn)行軌跡規(guī)劃與實(shí)時(shí)控制,使機(jī)械臂平穩(wěn)、快速地到達(dá)指定位姿。
項(xiàng)目成果
搭建了硬磁驅(qū)動(dòng)的血管介入導(dǎo)絲機(jī)器人硬件與軟件系統(tǒng);建立了cosserat rod模型,計(jì)算在特定磁場(chǎng)下導(dǎo)絲的變形;識(shí)別血管范圍并篩選最優(yōu)路徑;實(shí)現(xiàn)血管中導(dǎo)絲導(dǎo)管自主推進(jìn)與收回;實(shí)現(xiàn)導(dǎo)絲導(dǎo)管在指定路徑中自主轉(zhuǎn)彎,進(jìn)入岔路;實(shí)時(shí)檢查導(dǎo)絲是否走入錯(cuò)誤路徑,如果走入錯(cuò)誤路徑,則退回修正,直到走入指定路徑;實(shí)現(xiàn)系統(tǒng)的全過(guò)程自動(dòng)化,無(wú)需人手操作;在緊急情況下可以使用手柄控制系統(tǒng),對(duì)導(dǎo)絲運(yùn)動(dòng)進(jìn)行干預(yù)。




