

順應(yīng)-感知-驅(qū)動(dòng)一體化柔性調(diào)姿機(jī)構(gòu)設(shè)計(jì)與開(kāi)發(fā)
最佳展示獎(jiǎng)
資助企業(yè):
 沐馳智能科技有限公司
沐馳智能科技有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 周林

指導(dǎo)教師: 陳根良
項(xiàng)目成員: 吳晨昊,吳欣怡,沈杰
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
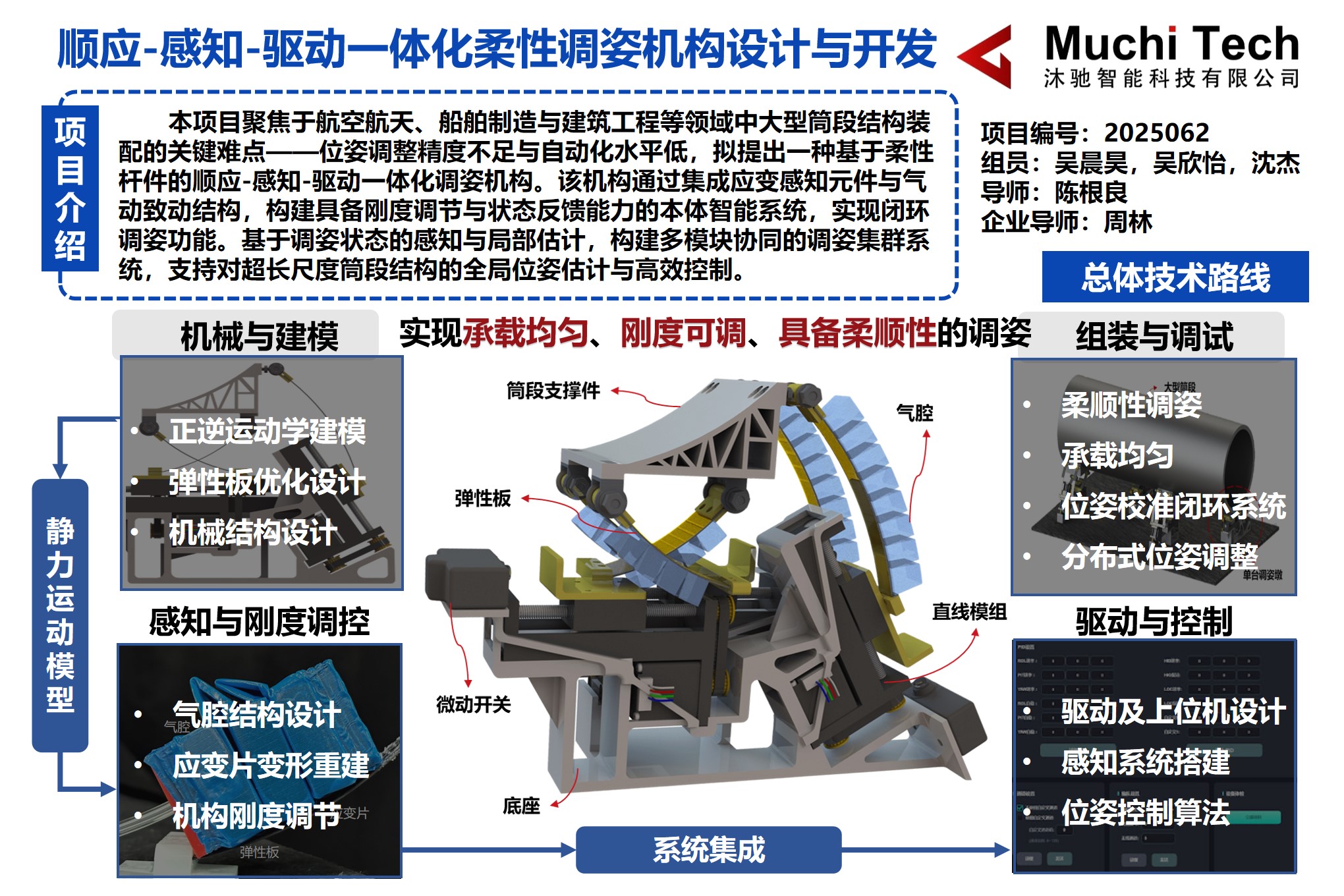
本項(xiàng)目聚焦于航空航天、船舶制造與建筑工程等領(lǐng)域中大型筒段結(jié)構(gòu)裝配的關(guān)鍵難點(diǎn)——位姿調(diào)整精度不足與自動(dòng)化水平低,擬提出一種基于柔性桿件的順應(yīng)-感知-驅(qū)動(dòng)一體化調(diào)姿機(jī)構(gòu)。該機(jī)構(gòu)通過(guò)集成應(yīng)變感知元件與氣動(dòng)致動(dòng)結(jié)構(gòu),構(gòu)建具備剛度調(diào)節(jié)與狀態(tài)反饋能力的本體智能系統(tǒng),實(shí)現(xiàn)閉環(huán)調(diào)姿功能。基于調(diào)姿狀態(tài)的感知與局部估計(jì),構(gòu)建多模塊協(xié)同的調(diào)姿集群系統(tǒng),支持對(duì)超長(zhǎng)尺度筒段結(jié)構(gòu)的全局位姿估計(jì)與高效控制。
項(xiàng)目目標(biāo)
項(xiàng)目總體目標(biāo)是開(kāi)發(fā)桌面級(jí)調(diào)姿機(jī)構(gòu)。
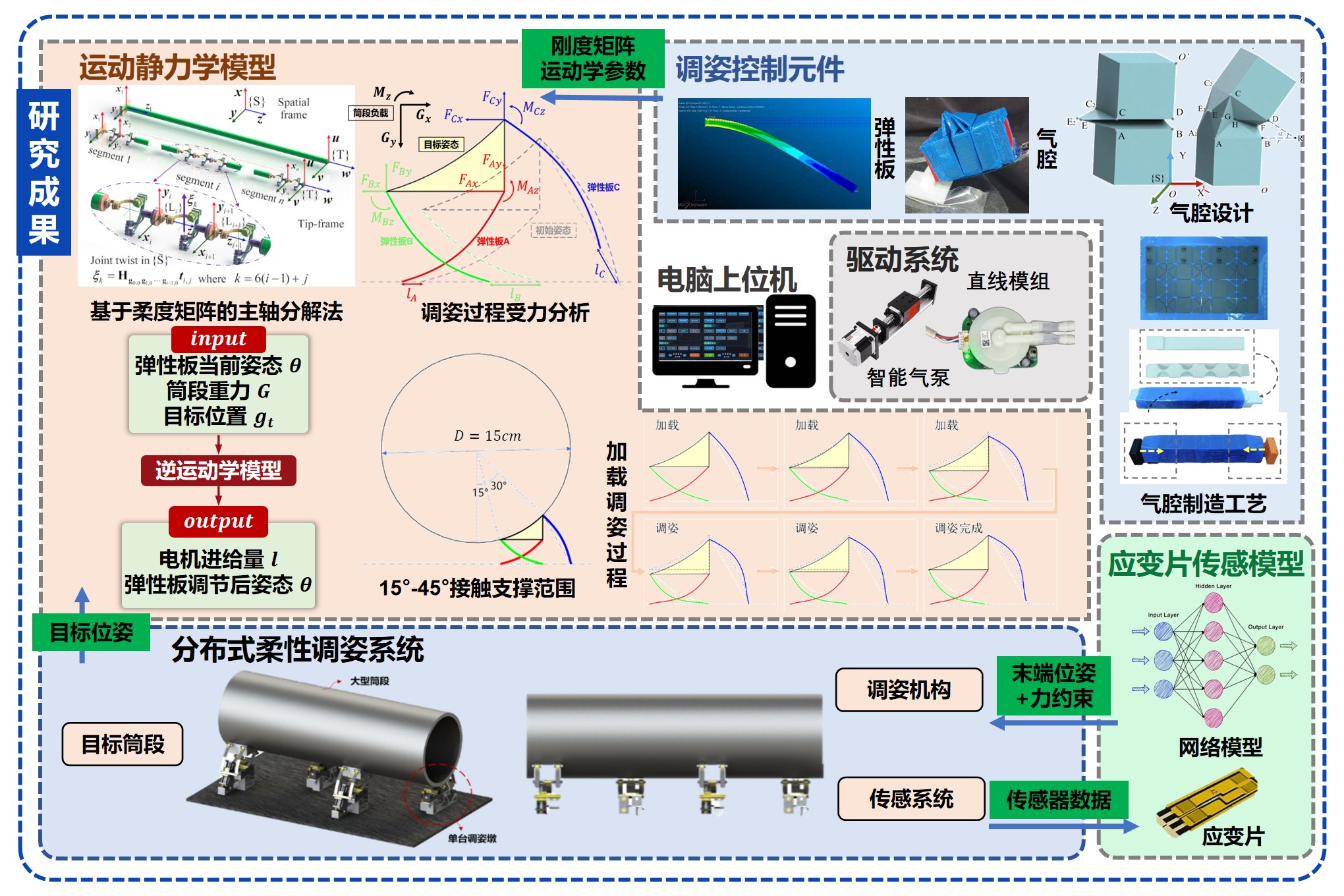
1)整機(jī)的結(jié)構(gòu)設(shè)計(jì)和運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析。建立大撓度柔性桿件單元的靜力學(xué)模型以及并聯(lián)柔順調(diào)姿機(jī)構(gòu)運(yùn)動(dòng)-靜力模型,并完成機(jī)構(gòu)的整體結(jié)構(gòu)設(shè)計(jì)。
2)氣腔制造和剛度分析。完成氣腔的設(shè)計(jì)與制造,并建立氣動(dòng)單元和柔性桿的運(yùn)動(dòng)學(xué)模型和組合剛度模型。
3)控制算法和系統(tǒng)集成。實(shí)現(xiàn)對(duì)氣泵和電機(jī)驅(qū)動(dòng)元件的同步控制,根據(jù)調(diào)姿機(jī)構(gòu)的任務(wù)要求,結(jié)合應(yīng)變片的感知數(shù)據(jù),開(kāi)發(fā)一體化閉環(huán)控制算法。
項(xiàng)目成果
本項(xiàng)目設(shè)計(jì)并開(kāi)發(fā)了一種順應(yīng)-感知-驅(qū)動(dòng)一體化的柔性調(diào)姿機(jī)構(gòu),由四個(gè)單臺(tái)調(diào)姿墩協(xié)同完成調(diào)姿任務(wù)。單臺(tái)調(diào)姿墩包含了柔性桿件、氣腔、應(yīng)變片、直線模組和筒段支撐件等主要結(jié)構(gòu)。通過(guò)讀取應(yīng)變片的數(shù)據(jù)可以獲取彈性板的變形狀況,可以計(jì)算得到支撐件上所承受的力,同時(shí)可以通過(guò)控制模塊調(diào)節(jié)氣泵和直線模組的輸出量,實(shí)現(xiàn)剛度的調(diào)控和單臺(tái)墩調(diào)姿機(jī)構(gòu)位姿的調(diào)節(jié)。最終將通過(guò)四臺(tái)調(diào)姿墩的協(xié)同控制實(shí)現(xiàn)大型筒段的調(diào)姿功能。




