

基于統(tǒng)計(jì)與機(jī)器學(xué)習(xí)的電池包下殼體小目標(biāo)異物監(jiān)測(cè)與分類(lèi)
工業(yè)工程
資助企業(yè):
 上汽大眾汽車(chē)有限公司
上汽大眾汽車(chē)有限公司
資助年份: 2023
企業(yè)導(dǎo)師: 王聰杰

指導(dǎo)教師: 李勇祥
項(xiàng)目成員: 郭爾雅 張午陽(yáng)
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
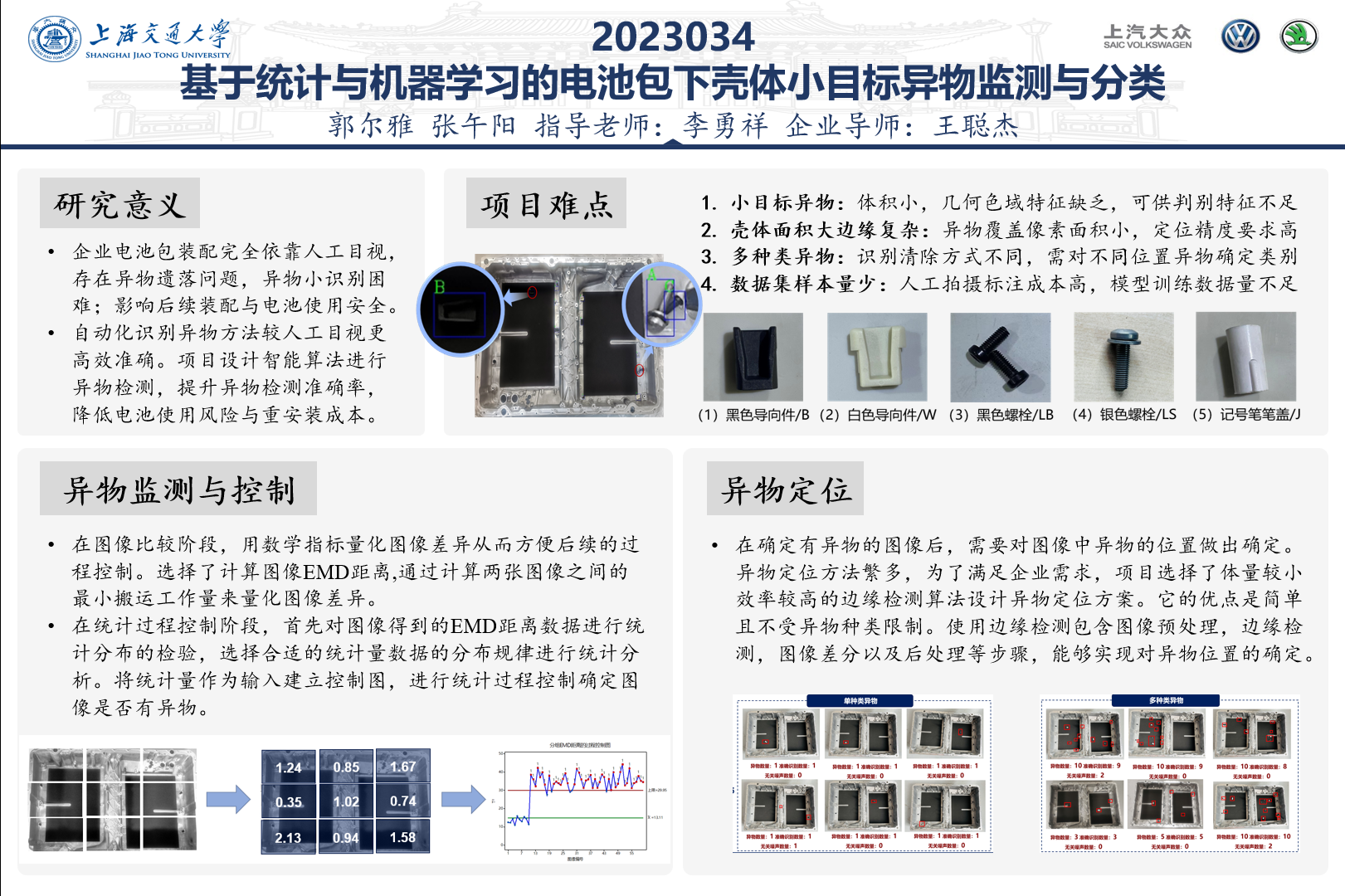
依賴(lài)人工目視檢查的電池包裝配過(guò)程異物識(shí)別方式易導(dǎo)致異物遺留,影響產(chǎn)品安全并增加生產(chǎn)成本。針對(duì)合作企業(yè)裝配車(chē)間異物目標(biāo)小、可供判別特征缺乏、檢測(cè)精度要求高的實(shí)際異物識(shí)別難點(diǎn),本項(xiàng)目建立基于統(tǒng)計(jì)方法的異物監(jiān)測(cè)與定位算法,和基于深度學(xué)習(xí)算法的小目標(biāo)異物分類(lèi)檢測(cè)框架;并設(shè)計(jì)開(kāi)發(fā)交互式異物識(shí)別軟件,使異物識(shí)別算法有效地落實(shí)到企業(yè)生產(chǎn)實(shí)際。該算法應(yīng)用于工位m070,在模組入箱前進(jìn)行異物監(jiān)測(cè)分類(lèi),滿(mǎn)足產(chǎn)線(xiàn)生產(chǎn)節(jié)拍需求。
項(xiàng)目目標(biāo)
1) 異物監(jiān)測(cè)控制:對(duì)手機(jī)的圖像數(shù)據(jù)與無(wú)異物圖像進(jìn)行比較,選擇合適的控制圖對(duì)比較結(jié)果進(jìn)行統(tǒng)計(jì)過(guò)程控制,判斷圖像中是否有異物出現(xiàn)。
2) 異物定位:基于計(jì)算機(jī)圖像處理方法對(duì)有異物圖像進(jìn)行異物識(shí)別,定位異物。
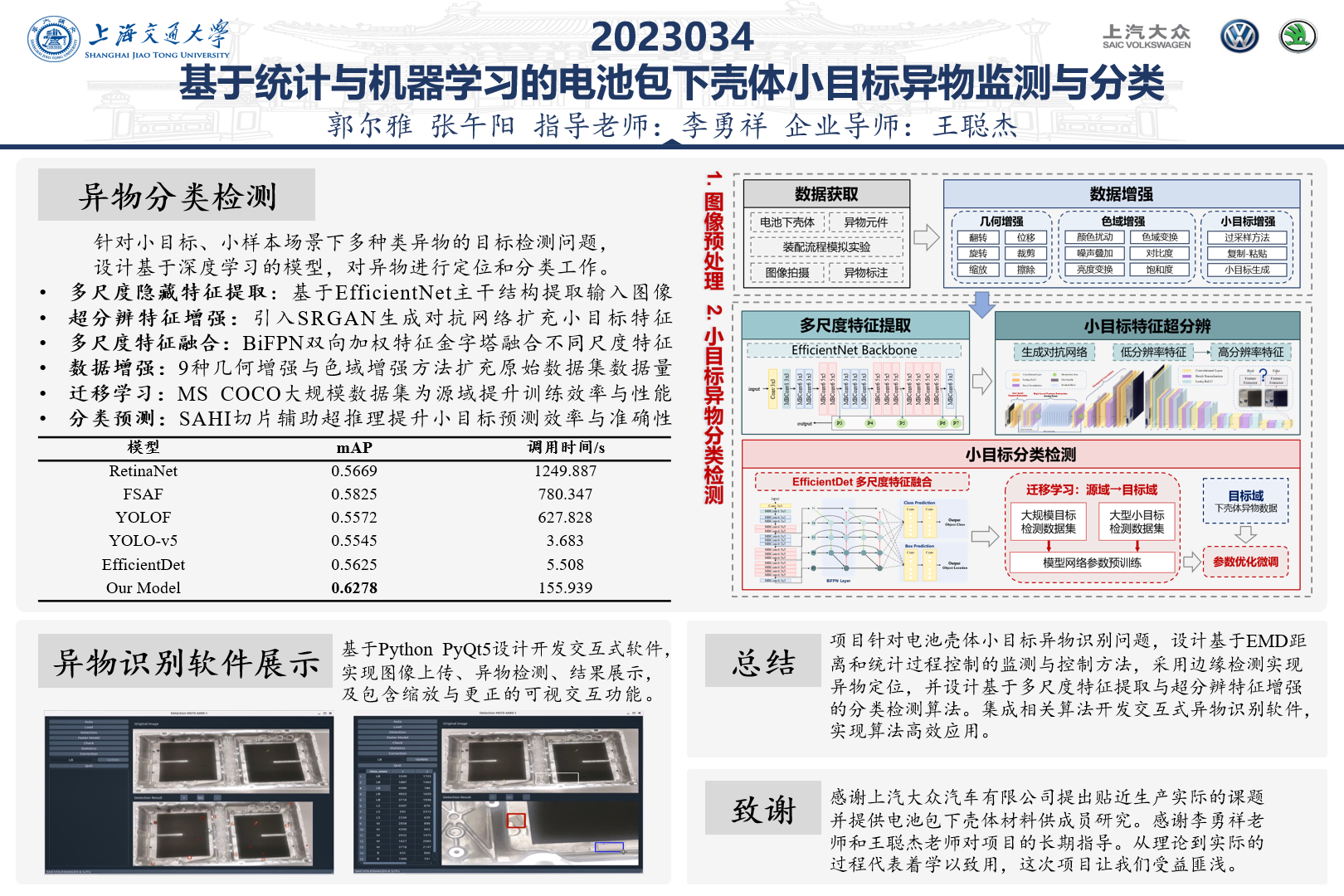
3) 異物分類(lèi)檢測(cè):基于深度學(xué)習(xí)方法建立異物目標(biāo)分類(lèi)檢測(cè)算法,正確識(shí)別不同位置處異物的類(lèi)別。
4) 異物識(shí)別軟件設(shè)計(jì)與開(kāi)發(fā):設(shè)計(jì)圖形化交互軟件,集成異物監(jiān)控、定位、分類(lèi)算法,提供異物識(shí)別結(jié)果可視化與交互功能。
項(xiàng)目成果
1) 針對(duì)圖像背景噪聲問(wèn)題使用計(jì)算分塊EMD距離與統(tǒng)計(jì)過(guò)程控制結(jié)合的方法將異物定位的準(zhǔn)確率提升至90%以上。
2) 利用邊緣檢測(cè)和圖像差分將單種類(lèi)與多種類(lèi)異物定位準(zhǔn)確率控制在80%及以上。
3) 項(xiàng)目設(shè)計(jì)一種基于超分辨特征增強(qiáng)和多尺度特征融合的小目標(biāo)分類(lèi)檢測(cè)算法,該算法的mAP指標(biāo)達(dá)到0.6278,優(yōu)于常用目標(biāo)檢測(cè)模型,可有效應(yīng)對(duì)企業(yè)需求。
4) 項(xiàng)目集成小目標(biāo)異物監(jiān)測(cè)與目標(biāo)監(jiān)測(cè)算法,基于PyQt5開(kāi)發(fā)交互式目標(biāo)識(shí)別軟件,實(shí)現(xiàn)圖像自動(dòng)化上傳、檢測(cè)和識(shí)別結(jié)果可視化交互功能。




