

內(nèi)艙操作機(jī)器人創(chuàng)新設(shè)計(jì)
機(jī)械工程
資助企業(yè):
 上海賽威德機(jī)器人有限公司
上海賽威德機(jī)器人有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 鄭開(kāi)云

指導(dǎo)教師: 王皓
項(xiàng)目成員: 李松源 陶涵 丁柯杭 聶根瑜
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)


 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
在雙層底船舶結(jié)構(gòu)中,格子艙結(jié)構(gòu)既是船體支撐結(jié)構(gòu)也是船體隔離結(jié)構(gòu),涉及船體多個(gè)關(guān)鍵部位,對(duì)于船舶的穩(wěn)定性起到重要作用。一艘普通的雙層底輪船大約有100~250個(gè)底內(nèi)艙,其中存在對(duì)接焊縫漏焊、內(nèi)部缺陷、裂縫、生銹等情況,需要工人定期自己進(jìn)入空間狹小、地形復(fù)雜的船艙內(nèi)對(duì)船體進(jìn)行檢測(cè)、探傷、維護(hù)工作,這種方式對(duì)于人力資源消耗大,效率低且空間可達(dá)性差,因此急需開(kāi)發(fā)一系列穩(wěn)定性強(qiáng)、維護(hù)效率高的船艙爬壁機(jī)器人來(lái)代替人力作業(yè)。
項(xiàng)目目標(biāo)
本項(xiàng)目旨在項(xiàng)目組中的每個(gè)成員根據(jù)不同的焊接場(chǎng)景分別設(shè)計(jì)針對(duì)弧形表面的單自由度焊縫跟蹤焊接機(jī)器人、針對(duì)直角焊縫的雙磁吸爬壁焊接機(jī)器人、針對(duì)過(guò)焊孔處焊接的仿人機(jī)械臂焊接機(jī)器人、針對(duì)底內(nèi)艙越障的鉆孔機(jī)器人,用以替代船舶內(nèi)艙惡劣環(huán)境下的人工作業(yè)。這些機(jī)器人相較于傳統(tǒng)人工作業(yè),既節(jié)省了人力成本,效率也顯著提升,工作過(guò)程的安全性也能得到保障,對(duì)維護(hù)船舶結(jié)構(gòu)的穩(wěn)定性具有重要作用。
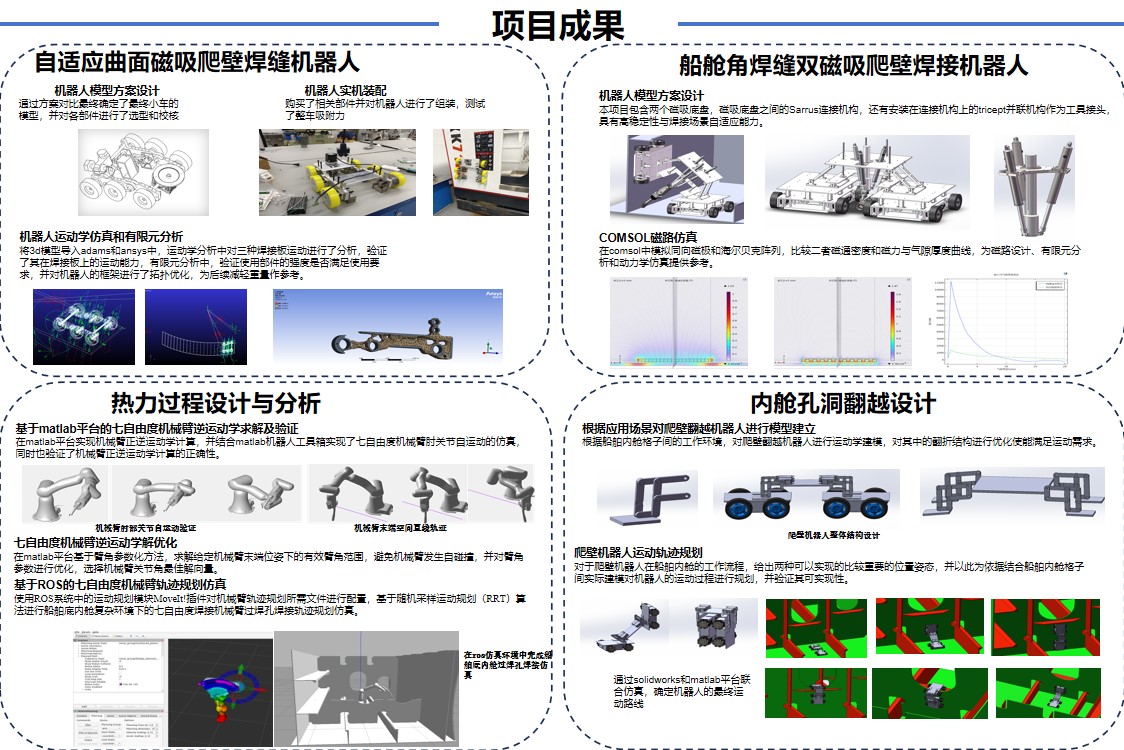
項(xiàng)目成果
對(duì)于自適應(yīng)曲面磁吸爬壁焊縫機(jī)器人,目前已完成機(jī)器人的模型方案設(shè)計(jì),對(duì)其進(jìn)行了運(yùn)動(dòng)學(xué)仿真和有限元分析,并進(jìn)行了機(jī)器人的實(shí)機(jī)裝配;對(duì)于船艙角焊縫雙磁吸爬壁機(jī)器人,目前完成了機(jī)器人的模型方案設(shè)計(jì)以及COMSOL磁路仿真;對(duì)于過(guò)焊孔仿人機(jī)械臂焊接機(jī)器人,完成基于matlab平臺(tái)的七自由度機(jī)械臂逆運(yùn)動(dòng)學(xué)求解及驗(yàn)證,對(duì)七自由度機(jī)械臂逆運(yùn)動(dòng)學(xué)解優(yōu)化,并基于ROS的七自由度機(jī)械臂軌跡規(guī)劃仿真;對(duì)于內(nèi)艙翻越穿孔機(jī)器人,目前完成了機(jī)器人的整體模型建立,并通過(guò)運(yùn)動(dòng)仿真對(duì)機(jī)器人翻越底艙障礙的運(yùn)動(dòng)進(jìn)行了路徑規(guī)劃。




