

多移動機(jī)器人協(xié)同編隊(duì)搬運(yùn)
機(jī)械工程
資助企業(yè):
 上海颯智智能科技有限公司
上海颯智智能科技有限公司
資助年份: 2025
企業(yè)導(dǎo)師: 鄒金沛

指導(dǎo)教師: 吳建華
項(xiàng)目成員: 趙四維 楊梓鴻 段延禮 孫思遠(yuǎn)
 項(xiàng)目海報
項(xiàng)目海報

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡介
項(xiàng)目簡介
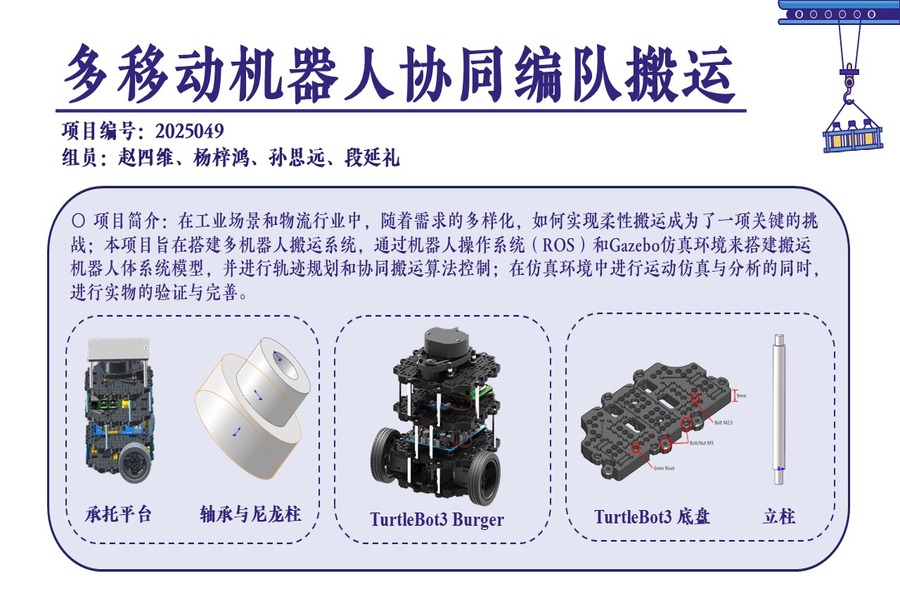
項(xiàng)目概述
在現(xiàn)代工業(yè)場景中,多機(jī)器人協(xié)同搬運(yùn)系統(tǒng)展現(xiàn)出廣泛的應(yīng)用潛力。本項(xiàng)目基于校企合作背景,根據(jù)颯智公司提供的設(shè)想,結(jié)合仿真環(huán)境與實(shí)際場景實(shí)驗(yàn),設(shè)計(jì)搭建了一套高效、穩(wěn)定、可擴(kuò)展的多機(jī)器人協(xié)同搬運(yùn)系統(tǒng)。該系統(tǒng)采用TurtleBot3 Burger作為驅(qū)動機(jī)器人,裝載可旋轉(zhuǎn)式承托結(jié)構(gòu),配合環(huán)境感知與高精度建圖和定位算法、多機(jī)器人互定位算法、路徑規(guī)劃導(dǎo)航算法、協(xié)同編隊(duì)控制算法,能在搬運(yùn)過程中通過雙輪差速驅(qū)動實(shí)現(xiàn)整體的平動、旋轉(zhuǎn)、避障等功能。
項(xiàng)目目標(biāo)
項(xiàng)目首先構(gòu)建雙輪差速驅(qū)動的AGV的動力學(xué)模型,設(shè)計(jì)建模并制造模塊化可旋轉(zhuǎn)式承托結(jié)構(gòu);結(jié)合ROS與Gazebo仿真平臺,開發(fā)相應(yīng)算法并驗(yàn)證,實(shí)現(xiàn)機(jī)器人基于RPLIDAR A2 360°激光掃描測距雷達(dá)的環(huán)境感知與高精度建圖定位、多機(jī)器人互定位、基于柵格地圖的路徑規(guī)劃導(dǎo)航、動態(tài)環(huán)境下多機(jī)器人編隊(duì)控制。最終目標(biāo)為構(gòu)建一套高效、穩(wěn)定、可擴(kuò)展的多機(jī)器人協(xié)同搬運(yùn)系統(tǒng),并在仿真環(huán)境與實(shí)際場景中完成算法測試和搬運(yùn)任務(wù)測試。
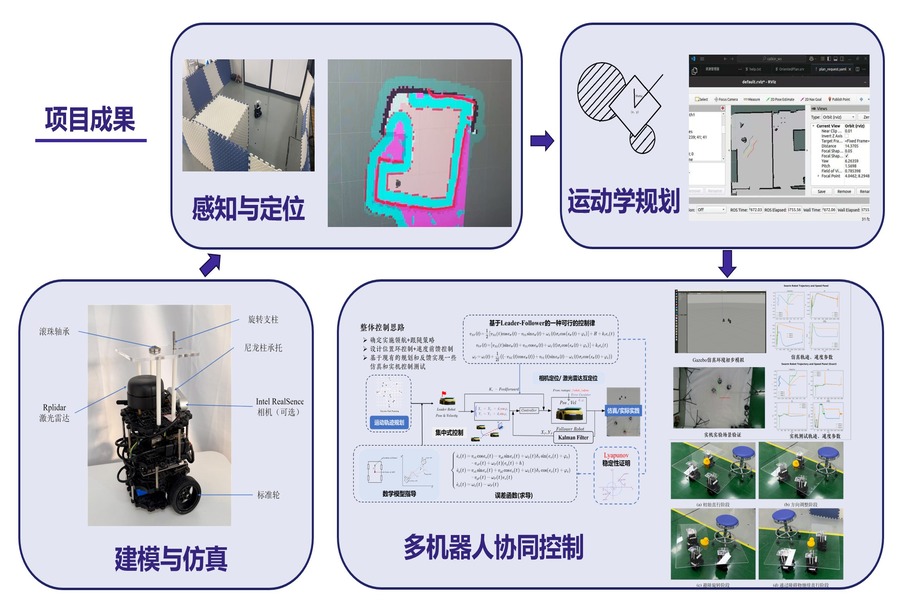
項(xiàng)目成果
本項(xiàng)目成功設(shè)計(jì)并實(shí)現(xiàn)了一套多機(jī)器人協(xié)同搬運(yùn)系統(tǒng),涵蓋機(jī)器人建模、硬件平臺構(gòu)建、環(huán)境感知與定位、路徑規(guī)劃、協(xié)同控制等模塊。系統(tǒng)基于TurtleBot3 Burger機(jī)器人,設(shè)計(jì)可旋轉(zhuǎn)式承托平臺,支持多機(jī)器人協(xié)同搬運(yùn)重物。在定位方面,融合Google Cartographer與ICP算法,實(shí)現(xiàn)高精度自主定位;路徑規(guī)劃算法結(jié)合搬運(yùn)物體具體形狀與地圖環(huán)境,規(guī)劃合理的協(xié)同搬運(yùn)路徑,提升搬運(yùn)效率與安全性;協(xié)同控制方面,引入Leader-Follower模型,設(shè)計(jì)相關(guān)控制律,確保機(jī)器人編隊(duì)穩(wěn)定。通過Gazebo仿真與實(shí)物實(shí)驗(yàn)驗(yàn)證,系統(tǒng)在實(shí)際環(huán)境中表現(xiàn)出良好的穩(wěn)定性、魯棒性與協(xié)同搬運(yùn)能力。




