

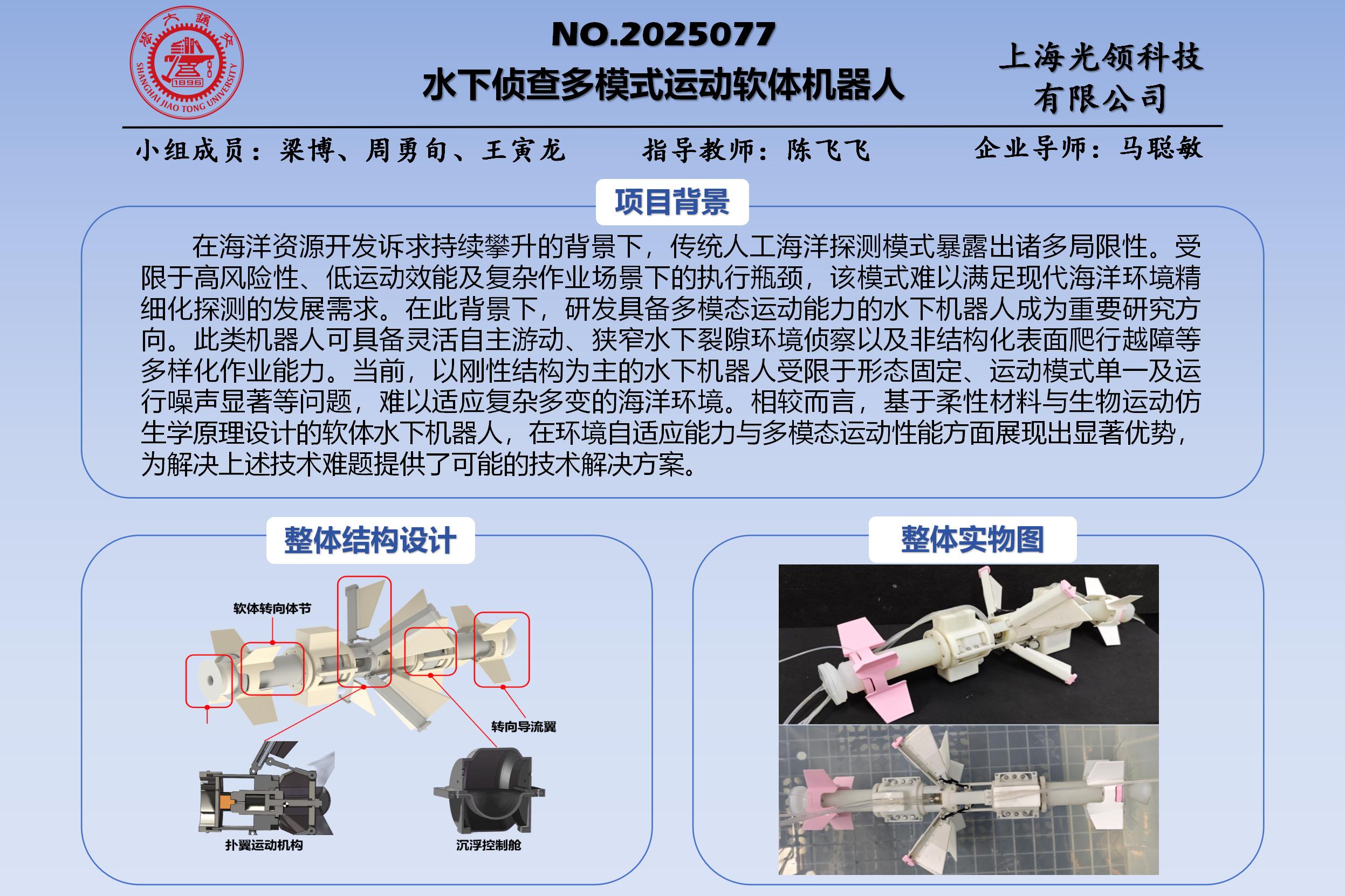
水下偵察多模式運動軟體機器人
機械工程資助企業(yè): 上海光領(lǐng)科技有限公司
資助年份: 2025
企業(yè)導師: 馬聰敏

指導教師: 陳飛飛
項目成員: 粱博 周勇旬 王寅龍
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
本項目針對海洋資源開發(fā)與生態(tài)保護領(lǐng)域?qū)Ω哌m應性水下探測裝備的迫切需求,聚焦傳統(tǒng)人工探測及剛性水下機器人在復雜海洋環(huán)境中面臨的技術(shù)瓶頸。針對傳統(tǒng)作業(yè)方式存在人員風險高、作業(yè)效率低,以及剛性機器人運動模式單一、環(huán)境適應性不足等核心問題,本研究創(chuàng)新性地提出一種具有多模態(tài)運動能力的仿生軟體水下機器人系統(tǒng)。通過融合柔性智能材料與仿生學原理,構(gòu)建可自主實現(xiàn)自由沉浮、三維巡游及表面越障的智能作業(yè)平臺,為深海科考、海底資源勘探及海洋生態(tài)監(jiān)測提供新的可能技術(shù)解決方案。
項目目標
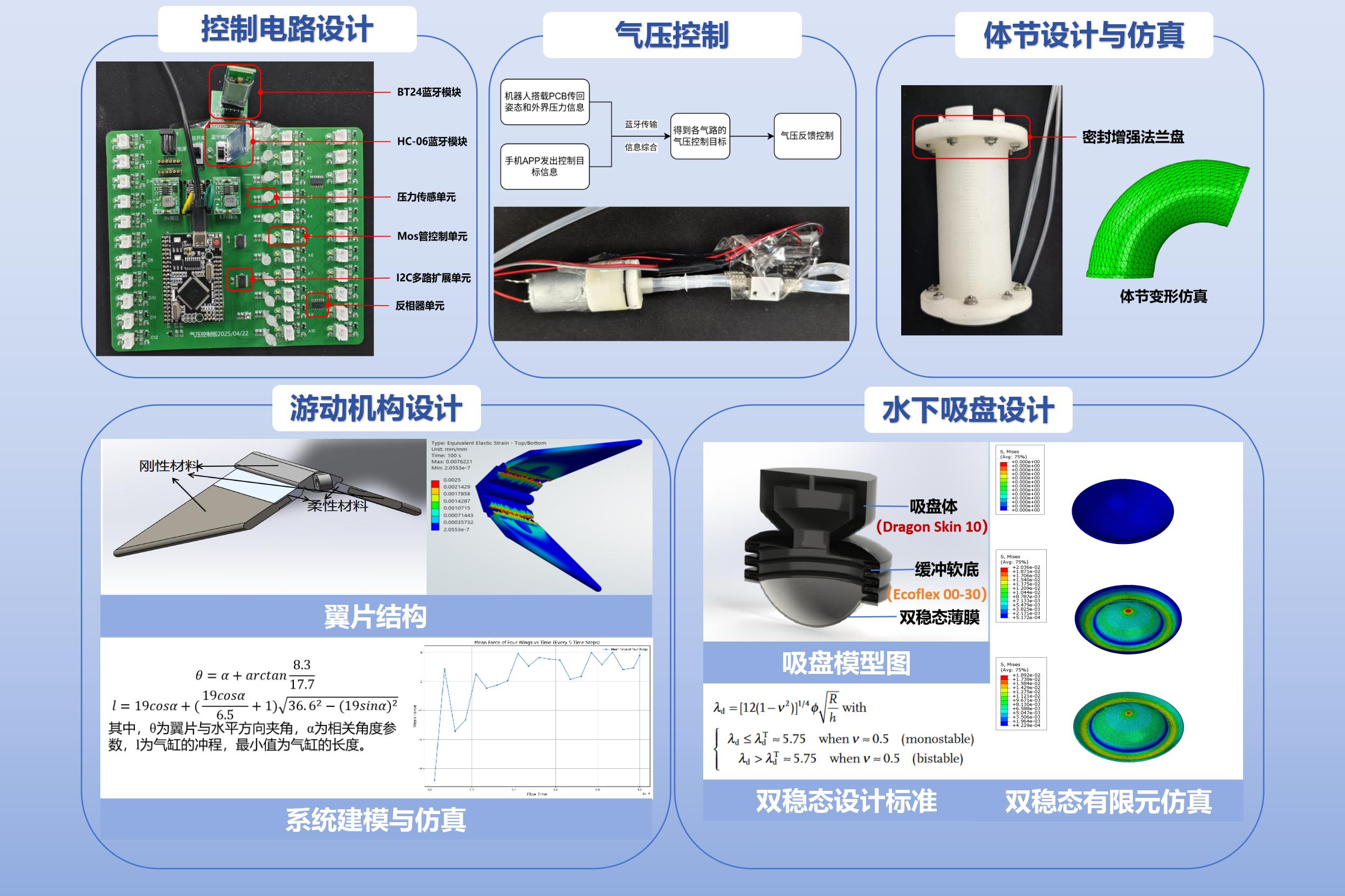
本項目以復雜水下環(huán)境偵察任務需求為牽引,著力構(gòu)建具備多模態(tài)運動能力的水下軟體機器人技術(shù)體系。主要研究內(nèi)容包括:(1)基于仿生柔性驅(qū)動原理,研制集成水下游弋推進、目標表面吸附及爬行等多模態(tài)運動功能的軟體機器人本體,通過拓撲結(jié)構(gòu)優(yōu)化與智能驅(qū)動控制算法開發(fā),實現(xiàn)其在海洋環(huán)境中的動態(tài)適應能力;(2)研究自適應吸附實現(xiàn)方法,重點研究吸盤表面仿生拓撲設計、硅膠復合材料的澆注成型工藝及多物理場耦合吸附動力學表征方法,探索多模態(tài)下的吸附問題解決方案;(3)開展多模態(tài)運動協(xié)同控制研究,通過數(shù)值仿真與試驗相結(jié)合的方式,評估機器人對水下目標的抵近偵察性能。
項目成果
本項目研制出一種具備三維空間多模態(tài)運動能力的仿生軟體水下機器人。主要成果包括:1) 系統(tǒng)設計方面,研制出了總長0.486m、質(zhì)量1031g的輕量化本體,通過硅膠柔性骨架與仿生撲翼的協(xié)同設計,實現(xiàn)前向游動;2) 驅(qū)動方式方面,設計了基于硅膠柔性材料的被動復位機構(gòu),能夠在周期撲翼的復位階段自動降低撥水面積,減少水流阻力,提升游動效率;3) 吸附系統(tǒng)方面,提出了具有雙穩(wěn)態(tài)特性的仿生吸盤結(jié)構(gòu)設計,預計可通過預負壓生成實現(xiàn)接觸瞬態(tài)的被動觸發(fā)式吸附;4) 運動控制方面,設計了分布式的氣壓輸入控制系統(tǒng),通過藍牙系統(tǒng)進行信息同步,實現(xiàn)精確、便捷的正負氣壓控制。




