

面向L4無(wú)人駕駛的智能轉(zhuǎn)向系統(tǒng)主動(dòng)跟隨魯棒控制研究
機(jī)械工程
資助企業(yè):
 上海萬(wàn)捷汽車控制系統(tǒng)有限公司
上海萬(wàn)捷汽車控制系統(tǒng)有限公司
資助年份: 2022
企業(yè)導(dǎo)師: 季強(qiáng)、李加良

指導(dǎo)教師: 吳曉東
項(xiàng)目成員: 駱涵,蔣雙麟,徐康
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目視頻
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
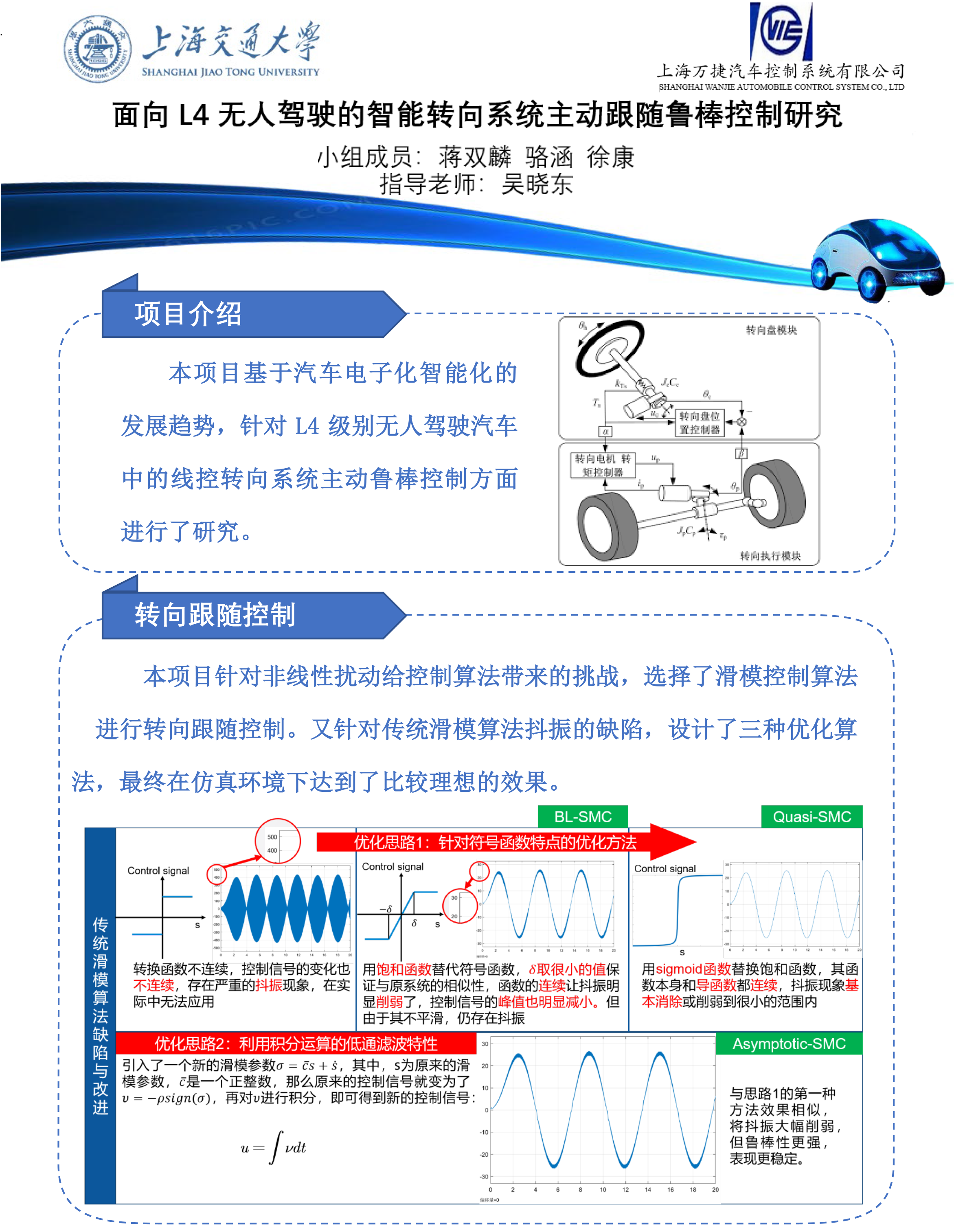
近年我國(guó)無(wú)人駕駛技術(shù)高速發(fā)展,但也存在安全性不夠高以及各項(xiàng)技術(shù)不成熟等問題。在無(wú)人駕駛車輛中,線控轉(zhuǎn)向系統(tǒng)相比于傳統(tǒng)的電動(dòng)助力轉(zhuǎn)向,因其特有的轉(zhuǎn)向器與執(zhí)行器分離的特點(diǎn),更適用于無(wú)人駕駛車輛。對(duì)于線控轉(zhuǎn)向系統(tǒng),如何在實(shí)現(xiàn)良好跟隨性能的同時(shí)保持系統(tǒng)安全,是我們面臨的主要挑戰(zhàn)。本項(xiàng)目著眼于L4級(jí)別無(wú)人駕駛的線控轉(zhuǎn)向系統(tǒng),主要研究具備抵抗非線性干擾的轉(zhuǎn)向跟隨算法、線控轉(zhuǎn)向系統(tǒng)的功能安全以及實(shí)驗(yàn)設(shè)計(jì)三大方面。
項(xiàng)目目標(biāo)
算法設(shè)計(jì)部分,需要滿足的性能指標(biāo)主要有:階躍響應(yīng)下系統(tǒng)的超調(diào)量小于5%,調(diào)節(jié)時(shí)間小于200ms,穩(wěn)態(tài)誤差小于1°;正弦響應(yīng)下,超調(diào)量小于5%,跟隨時(shí)間小于100ms。除此之外,還有魯棒性的要求,具體而言,在路面條件發(fā)生變化時(shí),系統(tǒng)也能保持良好的跟隨性能。
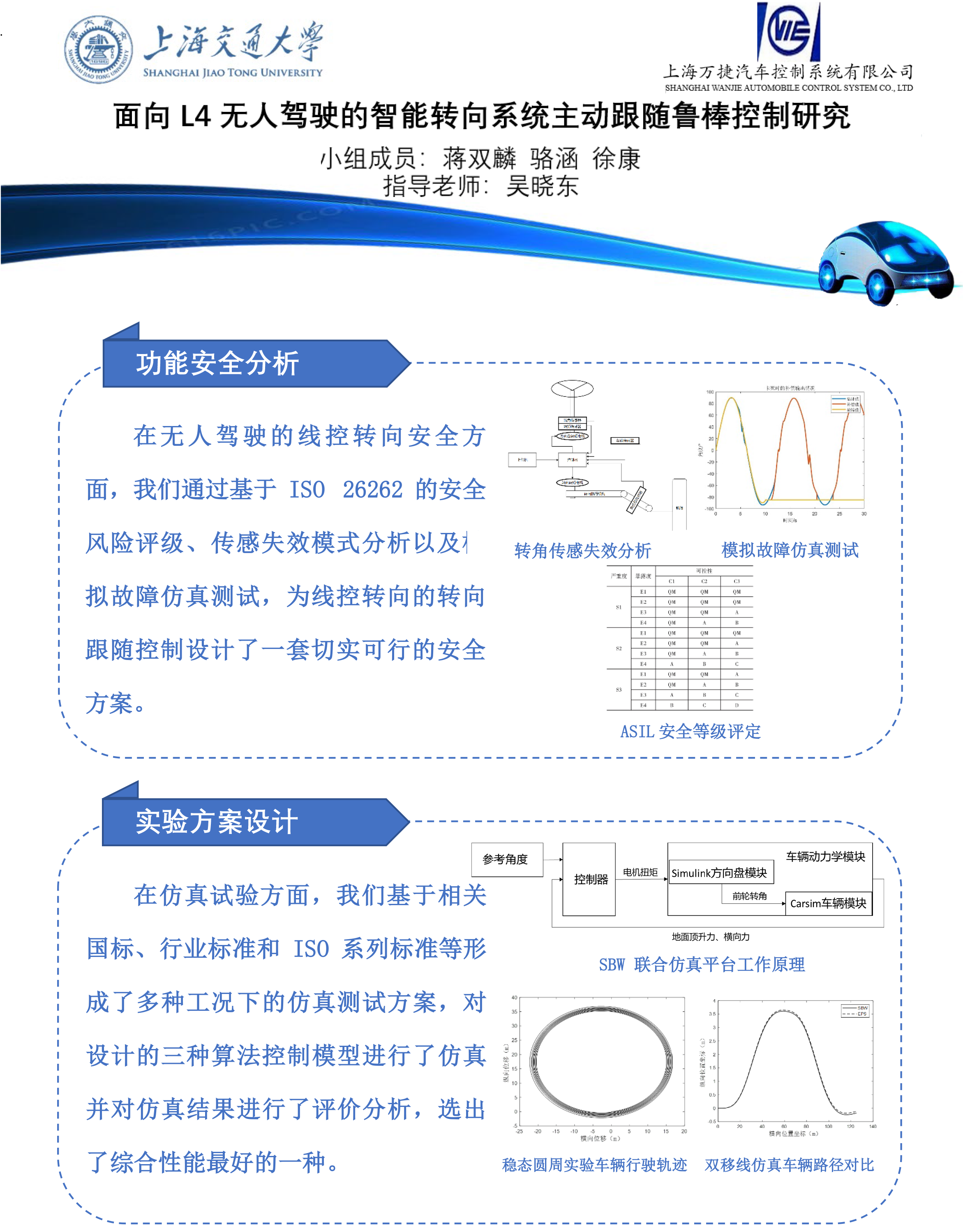
安全需求方面,針對(duì)面向自動(dòng)駕駛的線控轉(zhuǎn)向系統(tǒng)的轉(zhuǎn)向跟隨控制,調(diào)研行業(yè)相關(guān)的安全標(biāo)準(zhǔn),進(jìn)行功能安全分析和失效策略設(shè)計(jì),給出一套切實(shí)可行的功能安全設(shè)計(jì)方案。
項(xiàng)目成果
在整個(gè)項(xiàng)目中,我們分別進(jìn)行了轉(zhuǎn)向跟隨算法設(shè)計(jì)、功能安全設(shè)計(jì)、以及仿真實(shí)驗(yàn)驗(yàn)證三個(gè)方面的工作。設(shè)計(jì)了三種基于滑模理論的轉(zhuǎn)向跟隨算法,并進(jìn)行了橫向比較;功能安全部分進(jìn)行了基于ASIL等級(jí)的功能安全分析和容錯(cuò)補(bǔ)償設(shè)計(jì)。最后參考多種測(cè)試標(biāo)準(zhǔn),設(shè)計(jì)了仿真驗(yàn)證實(shí)驗(yàn)方案,進(jìn)行了軟件聯(lián)合仿真。整個(gè)研究過程從理論研究到具體設(shè)計(jì),再到仿真驗(yàn)證,層層遞進(jìn),最終形成我們的研究成果。最終能夠?qū)崿F(xiàn)較好的轉(zhuǎn)向跟隨效果,基本滿足了客戶需求。




