

彈性四足步行機器人設計與建模仿真分析
機械工程
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2022
企業(yè)導師: 付傲然

指導教師: 陳根良
項目成員: 李佳澳,陸瑜亮,姚思越
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
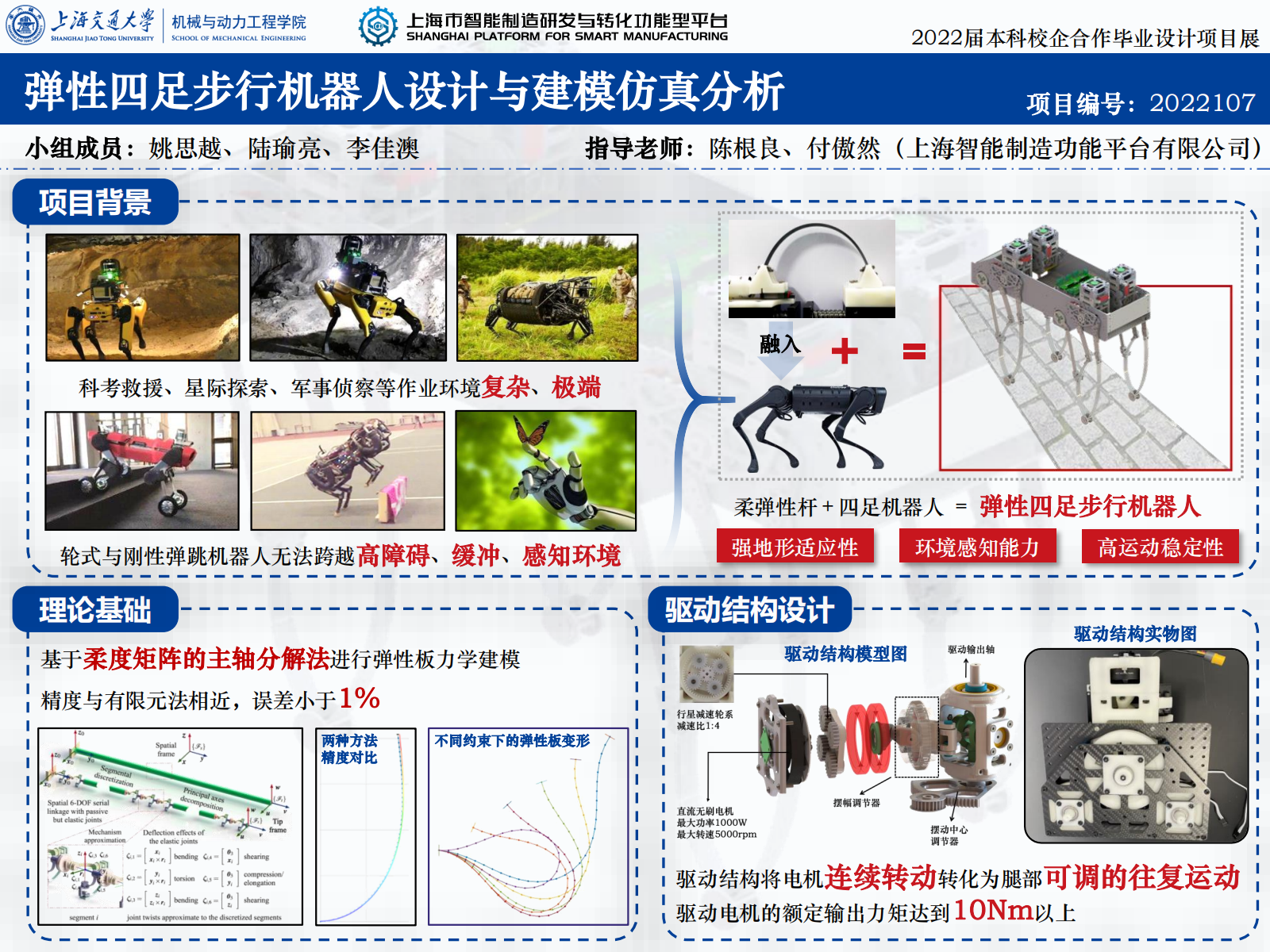
隨著科技發(fā)展,機器人越來越多參與到復雜、極端的環(huán)境中作業(yè),如科考救援、星際探索、軍事偵查等。強地形適應性、環(huán)境感知能力以及運動穩(wěn)定性是該類機器人的核心需求。本課題將彈性板引入四足機器人設計,利用彈性板大變形與儲能特性設計出一種新式的彈性四足步行機器人,建立實體模型并實現(xiàn)彈跳落地緩沖、行走步態(tài)控制與環(huán)境感知分析等功能的閉環(huán)傳感反饋控制。
項目目標
(1)完成一種基于彈性板的彈性四足步行機器人的構(gòu)型設計,并完成實時且有較高精度的力學建模。
(2)設計傳感器布置方案與反饋算法并減小傳感器讀數(shù)隨機誤差帶來的影響。
(3)基于傳感器信息實現(xiàn)反饋控制,完成對周圍環(huán)境的感知
(4)實現(xiàn)行走步態(tài)控制與起跳落地緩沖控制,減小結(jié)構(gòu)在運動過程中所收到的剛性沖擊。
(5)完成所需的驅(qū)動部分設計與實物部分設計,并繪制相應的三維模型與零件圖。
項目成果
(1)本項目初步完成了彈性四足步行機器人的結(jié)構(gòu)設計與實體設計,實現(xiàn)了將電機勻速轉(zhuǎn)動變換為往復擺動的驅(qū)動機構(gòu)。
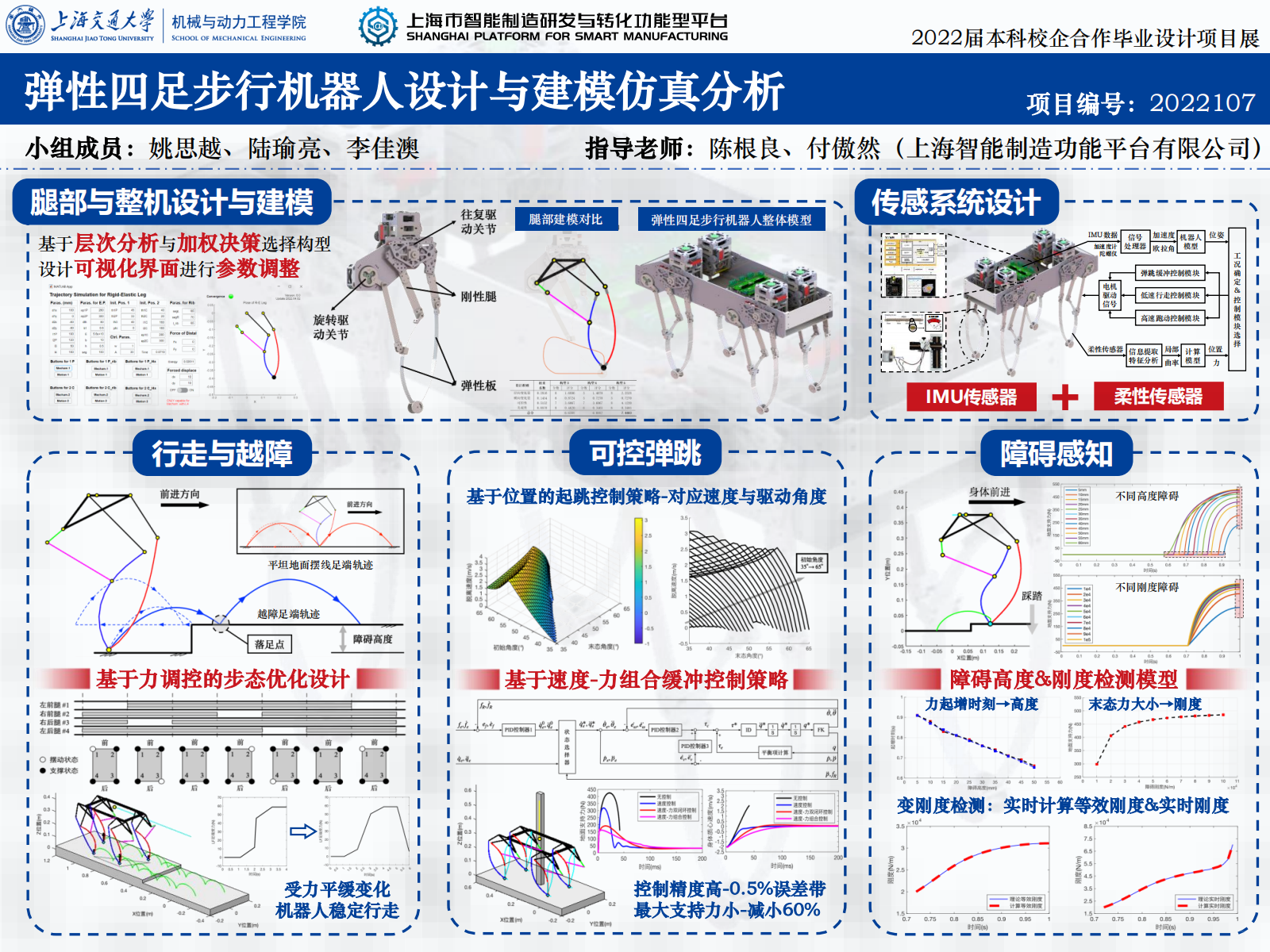
(2)本項目建立了腿部的力學模型,同時使用冗余數(shù)量的傳感器實現(xiàn)了對外部載荷的感知反饋。利用傳感信息,完成了對障礙高度與剛度的檢測方案與仿真。
(3)本項目完成了對腿部的主動控制仿真,設計整機行走步態(tài)與控制策略,同時實現(xiàn)了機器人從起跳到落地緩沖完整過程的動態(tài)仿真,減小了對機構(gòu)的剛性沖擊。




