

自動打磨機器人軌跡規(guī)劃方法與系統(tǒng)設計
機械工程
資助企業(yè):
 上海智能制造功能平臺有限公司
上海智能制造功能平臺有限公司
資助年份: 2023
企業(yè)導師: 丁浩倫

指導教師: 陶建峰
項目成員: 李健,陳睿,顧俊,肖子吟
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
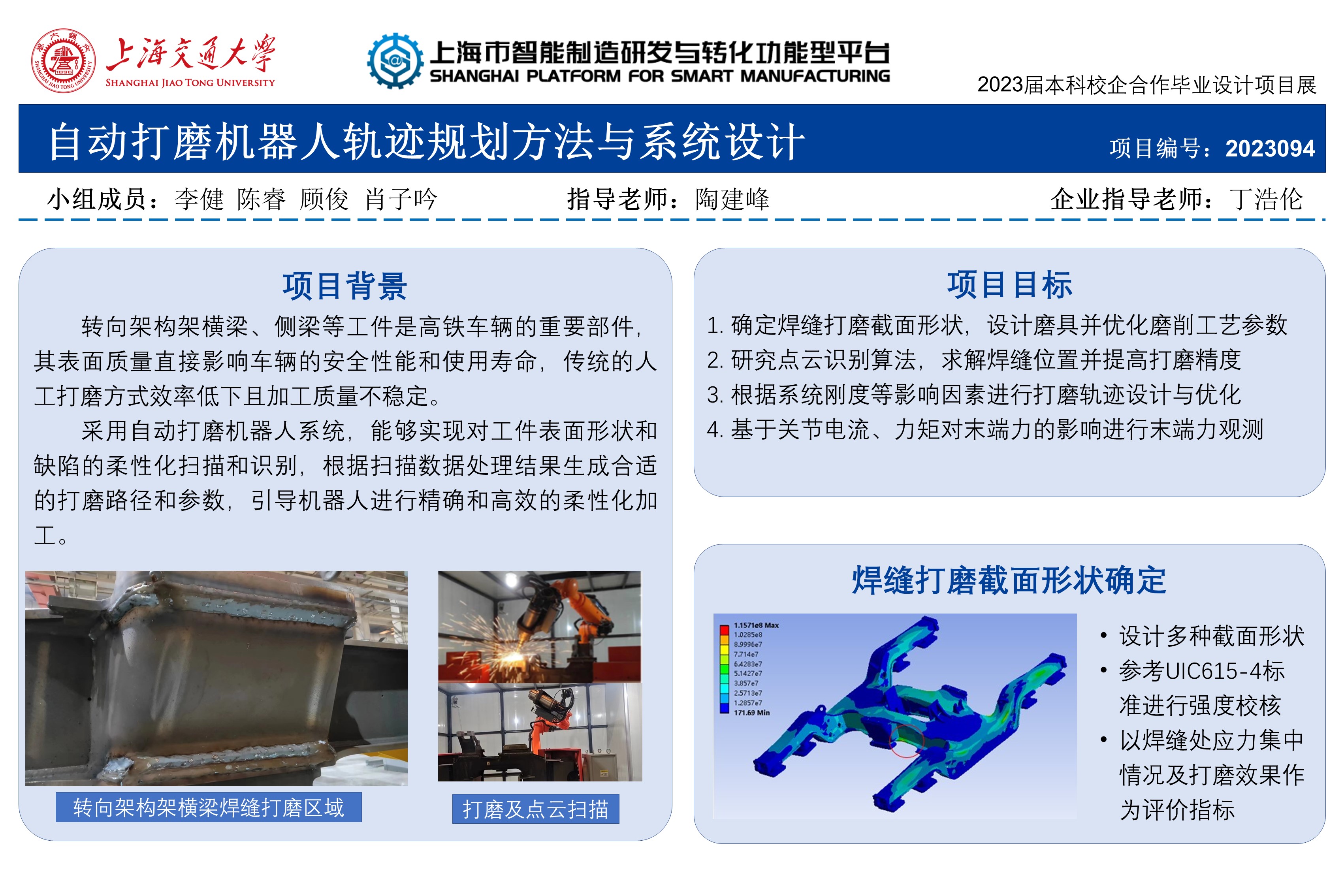
轉向架構架橫梁、側梁等工件是高鐵車輛的重要部件,其表面質量直接影響車輛的安全性能和使用壽命,傳統(tǒng)的人工打磨方式效率低下且加工質量不穩(wěn)定。因此,本項目采用自動打磨機器人系統(tǒng),該系統(tǒng)由視覺傳感器、打磨刀具和機器人本體組成,能夠實現(xiàn)對工件表面形狀和缺陷的柔性化掃描和識別,根據(jù)掃描數(shù)據(jù)處理結果生成合適的打磨路徑和參數(shù),引導機器人進行精確和高效的柔性化加工。
項目目標
本項目主要目標在于對機器人打磨焊縫過程進行優(yōu)化,縮短加工節(jié)拍、提高打磨精度。項目主要分為以下四個部分展開。
1. 對不同打磨截面形狀的焊縫開展應力分析,確定打磨截面形狀,并基于此設計磨具,對磨削工藝參數(shù)進行優(yōu)化。
2. 研究通過視覺識別將工件的位置信息化為點云圖的算法,并能據(jù)此求得焊縫位置,優(yōu)化識別算法提高打磨精度。
3. 全面分析系統(tǒng)振動、剛度、負載重力等影響因素進行打磨軌跡設計與優(yōu)化。
4. 基于研究關節(jié)電機電流、力矩對末端力的影響進行末端力觀測。
項目成果
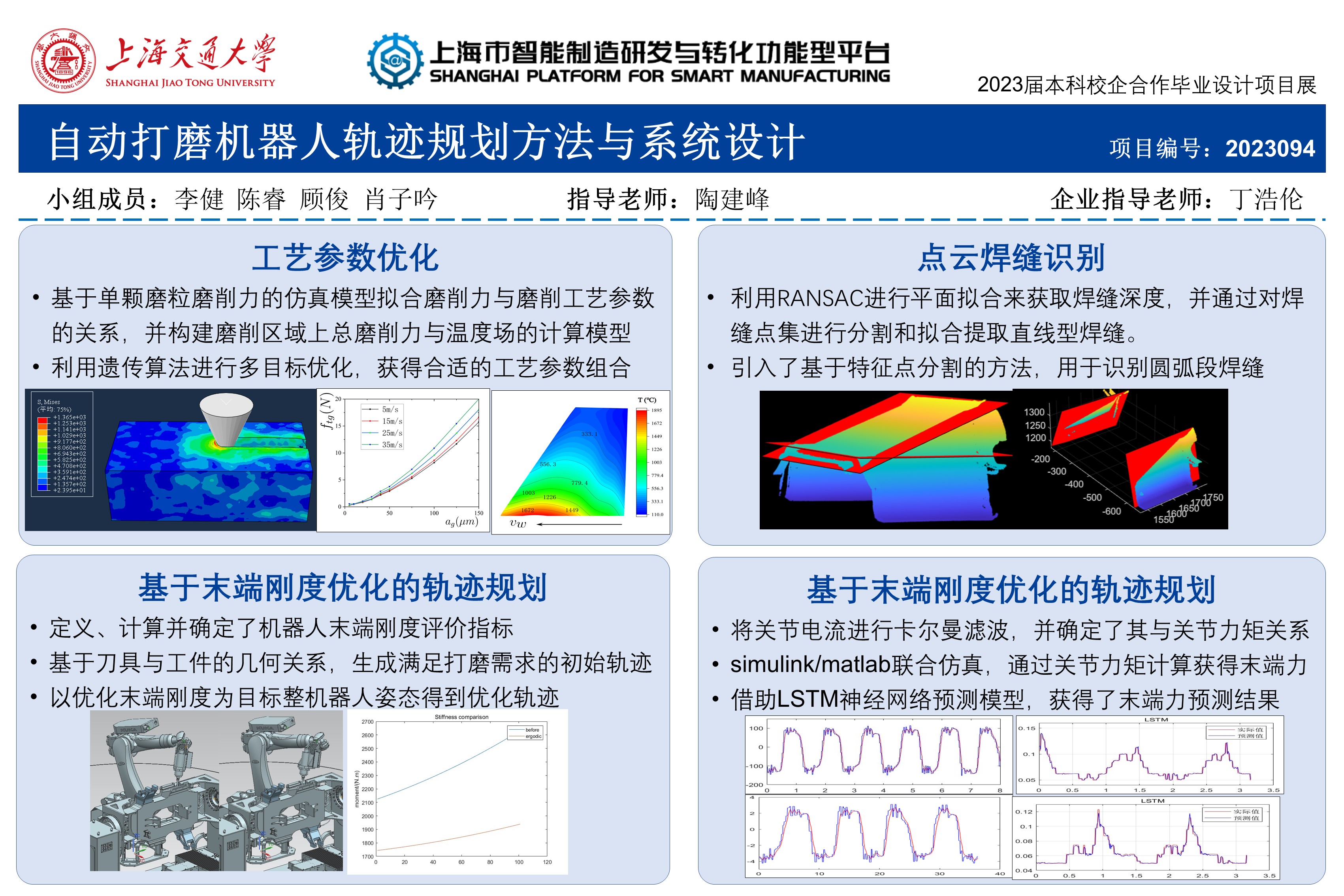
1.通過應力分析確定了焊縫打磨截面形狀,設計了對應的仿形磨具,并根據(jù)磨削力、加工效率和磨削比能對磨削工藝參數(shù)進行了多目標優(yōu)化。
2.針對點云焊縫的識別,通過數(shù)學計算和模型特征對比的方法并結合機器人、工件姿態(tài)等信息,成功地實現(xiàn)了焊縫的自動識別和分析。
3.建立了末端剛度評價指標,設計了滿足打磨要求的打磨軌跡,并根據(jù)剛度評價指標在該打磨軌跡的基礎上對機器人進行姿態(tài)調整,實現(xiàn)末端剛度優(yōu)化。
4.對機器進行了動力學分析,對關節(jié)電流進行了卡爾曼濾波,借助仿真模型計算了末端力,通過LSTM神經(jīng)網(wǎng)絡模型對末端力進行了預測。




