

面向特種設(shè)備智能巡檢的地空機器人協(xié)作觀測系統(tǒng)
機械工程
資助企業(yè):
 上海市特種設(shè)備監(jiān)督檢驗技術(shù)研究院
上海市特種設(shè)備監(jiān)督檢驗技術(shù)研究院
資助年份: 2023
企業(yè)導(dǎo)師: 陳慶誠

指導(dǎo)教師: 董偉
項目成員: 潘達、謝以辰、史樞洋、徐培淞
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
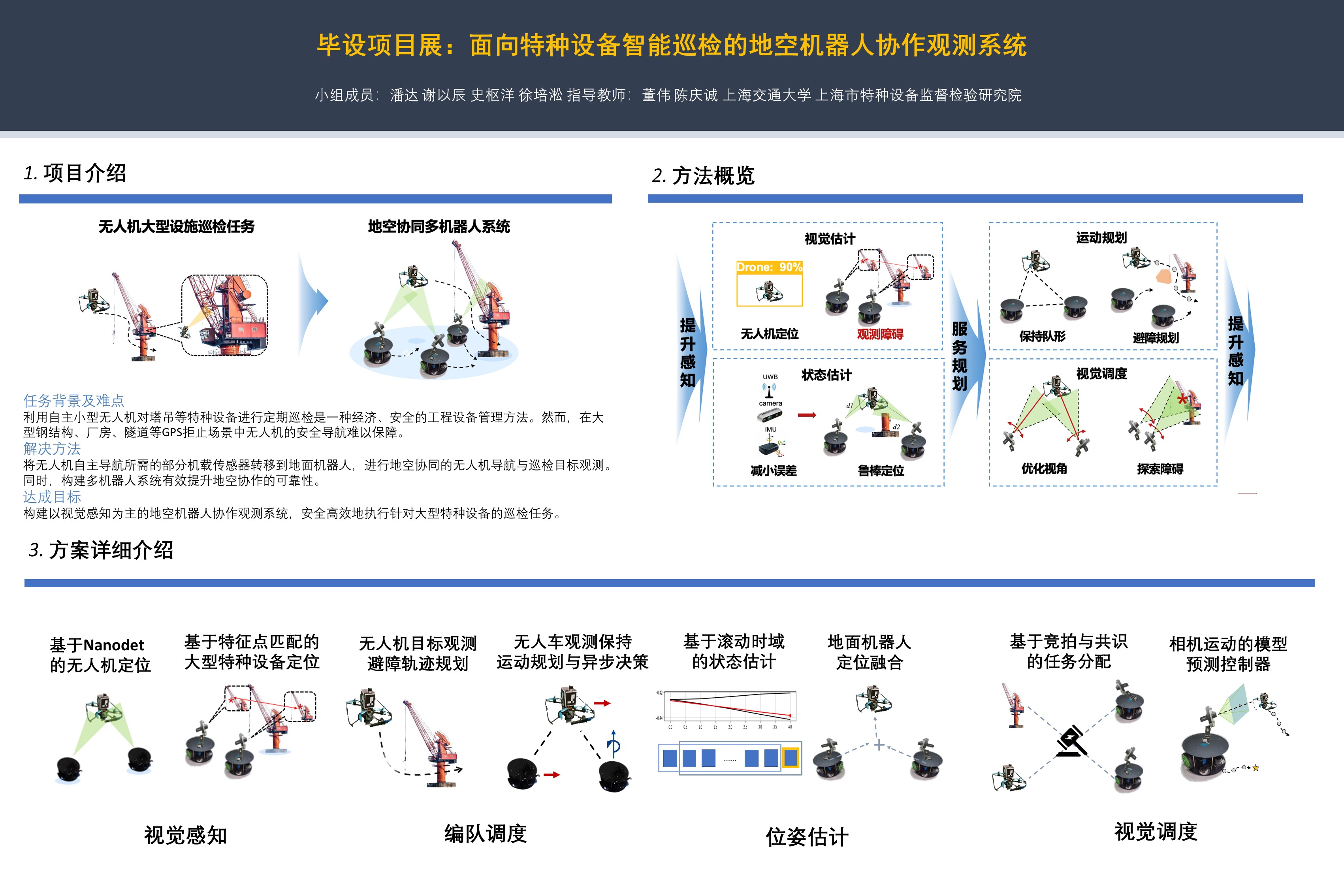
針對起重機等大型特種設(shè)備智能巡檢任務(wù),采用空中機器人巡檢是一種經(jīng)濟、高效的設(shè)施管理手段。以機載傳感器為基礎(chǔ)的自主導(dǎo)航系統(tǒng)明顯的增加了空中機器人自身的體積與質(zhì)量,大幅減低其續(xù)航能力與運動敏捷特性,為解決空中機器人負載限制和自主導(dǎo)航穩(wěn)定性問題,采用地空協(xié)同方式,將大部分機載載荷遷移至地面移動機器人端,利用視覺識別定位空中機器人。本項目擬基于主動視覺、協(xié)同觀測、運動規(guī)劃、多源信息融合問題展開深入探索,以期建立具有高效、敏捷作業(yè)任務(wù)能力的地空運動觀測與協(xié)同規(guī)劃理論方法與關(guān)鍵技術(shù)。
項目目標
建立地面機器人對空中機器人互觀測定位技術(shù):建立多機器人多自由度主動視覺系統(tǒng)運動學(xué)模型,研究基于先驗特征標記的多主動視覺系統(tǒng)相對位姿實時解算方法。
建立機器人運動狀態(tài)的多傳感器信息融合方法:結(jié)合主動視覺系統(tǒng)觀測結(jié)果,引入多傳感器融合定位技術(shù),結(jié)合視覺以外傳感器提升運動狀態(tài)觀測精度。
建立多目標協(xié)同調(diào)度和控制技術(shù)。在研究服務(wù)于最優(yōu)觀測質(zhì)量的協(xié)同運動優(yōu)化方法,完成針對地空機器人的協(xié)作調(diào)度控制。
實現(xiàn)地空協(xié)同規(guī)則目標障礙物觀測。在多機器人系統(tǒng)相對位姿解算方法基礎(chǔ)上,引入對遠處第三方規(guī)則目標單位觀測與定位方法,定位目標障礙物。
項目成果
搭建研制了一架無人機、兩架無人車組成的地空協(xié)作多機器人系統(tǒng);并且完成了視覺估計、傳感融合、運動規(guī)劃、視覺調(diào)度軟硬件設(shè)計。
視覺估計部分完成了對無人機的識別定位以及對障礙物的特征匹配,無人機識別準確度可達90%;
傳感融合部分實現(xiàn)了基于優(yōu)化的IMU數(shù)據(jù)與視覺定位結(jié)果融合,能有效消除視覺異常值,得到連續(xù)的無人機定位曲線;
運動規(guī)劃部分實現(xiàn)了地空機器人控制器,并且部署驗證了地空機器人軌跡優(yōu)化算法,保證了地空協(xié)作系統(tǒng)的觀測隊形和運動效率;
視覺調(diào)度部分完成了調(diào)度任務(wù)的建模以及相機轉(zhuǎn)角MPC控制器的設(shè)計,保證無人機位置距視野中心的距離不超過5cm。




