

智慧路網(wǎng)系統(tǒng)自動(dòng)駕駛小車控制系統(tǒng)設(shè)計(jì)
機(jī)械工程資助企業(yè): 弗祐機(jī)器人科技(上海)有限公司
資助年份: 2023
企業(yè)導(dǎo)師: 楊明倫

指導(dǎo)教師: 黃宏成
項(xiàng)目成員: 劉亞杰、王寅泰、史蕭訸
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
現(xiàn)今汽車技術(shù)正朝著“智能化、網(wǎng)聯(lián)化、電動(dòng)化、共享化”新四化方向發(fā)展,智能汽車是指通過搭載先進(jìn)傳感器、控制器和執(zhí)行器等裝置,使用互聯(lián)網(wǎng)、大數(shù)據(jù)、人工智能等新技術(shù),具備部分或完全自動(dòng)駕駛功能的新一代汽車,本項(xiàng)目擬開發(fā)一款能夠在路網(wǎng)系統(tǒng)中實(shí)現(xiàn)自動(dòng)駕駛的1/16ROS智能小車,使其能夠通過自身傳感器和處理器,實(shí)現(xiàn)自動(dòng)駕駛的功能,同時(shí)能夠?qū)⑿≤囘\(yùn)動(dòng)信息和檢測(cè)到的道路信息顯示出來,為中學(xué)生搭建智能駕駛科創(chuàng)實(shí)踐平臺(tái)。
項(xiàng)目目標(biāo)
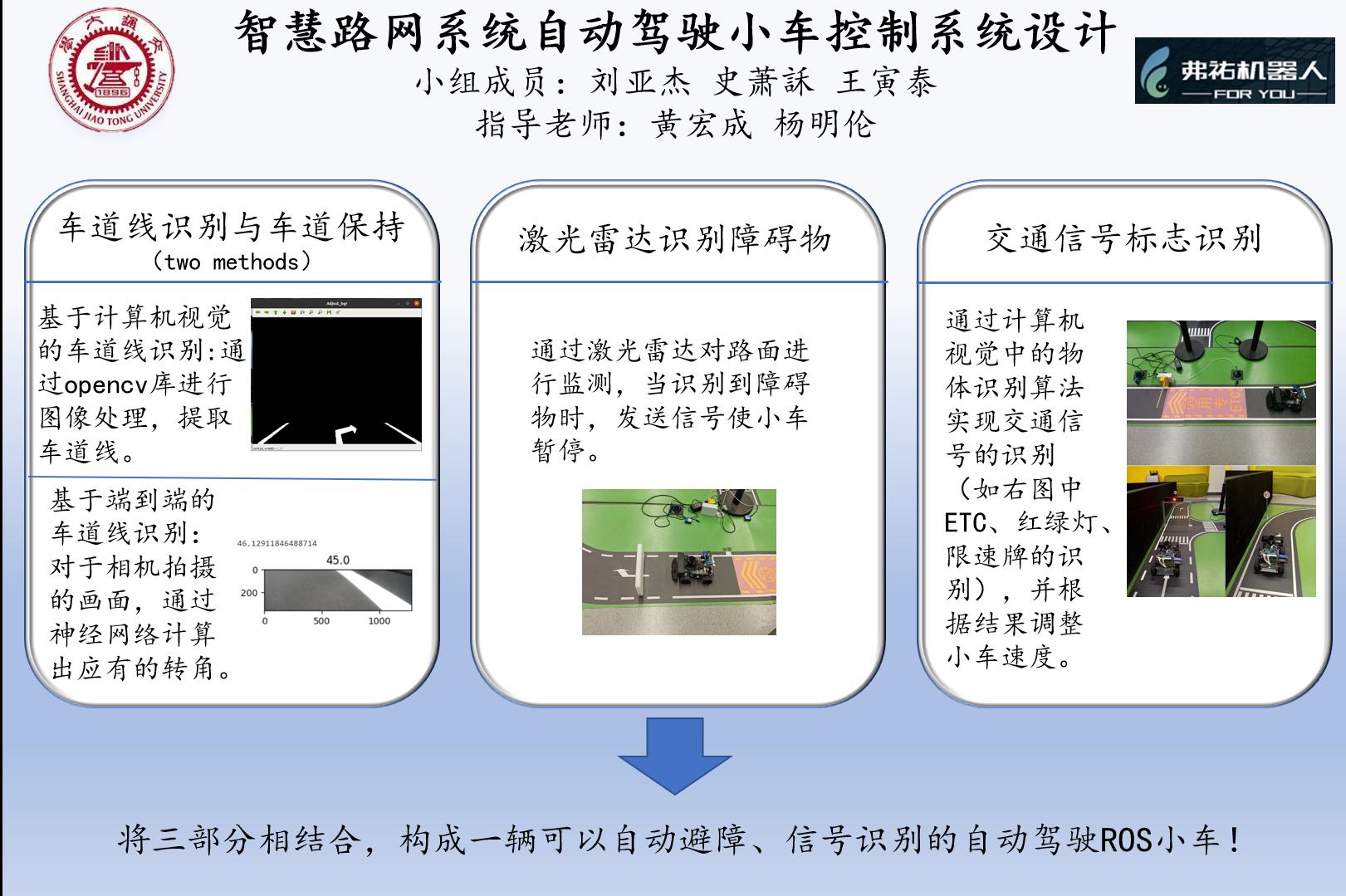
為了能夠使ROS小車能夠在模型中實(shí)現(xiàn)自動(dòng)駕駛功能,本項(xiàng)目的主要功能將分為以下三大部分:一,實(shí)現(xiàn)車道線識(shí)別,是小車能夠根據(jù)車道線的走向調(diào)整小車前進(jìn)方向,從而使小車沿著車道線行駛;二,識(shí)別道路中包括紅路燈、限速標(biāo)、ETC通道、斑馬線在內(nèi)的道路交通信號(hào),并能夠根據(jù)識(shí)別到的交通信號(hào)調(diào)整小車速度;三,實(shí)現(xiàn)道路模型的2D建圖,在設(shè)定好若干目標(biāo)點(diǎn)之后,使小車能夠依次到達(dá)這些位置,同時(shí)檢測(cè)道路中的障礙物并上傳信號(hào)。
項(xiàng)目成果
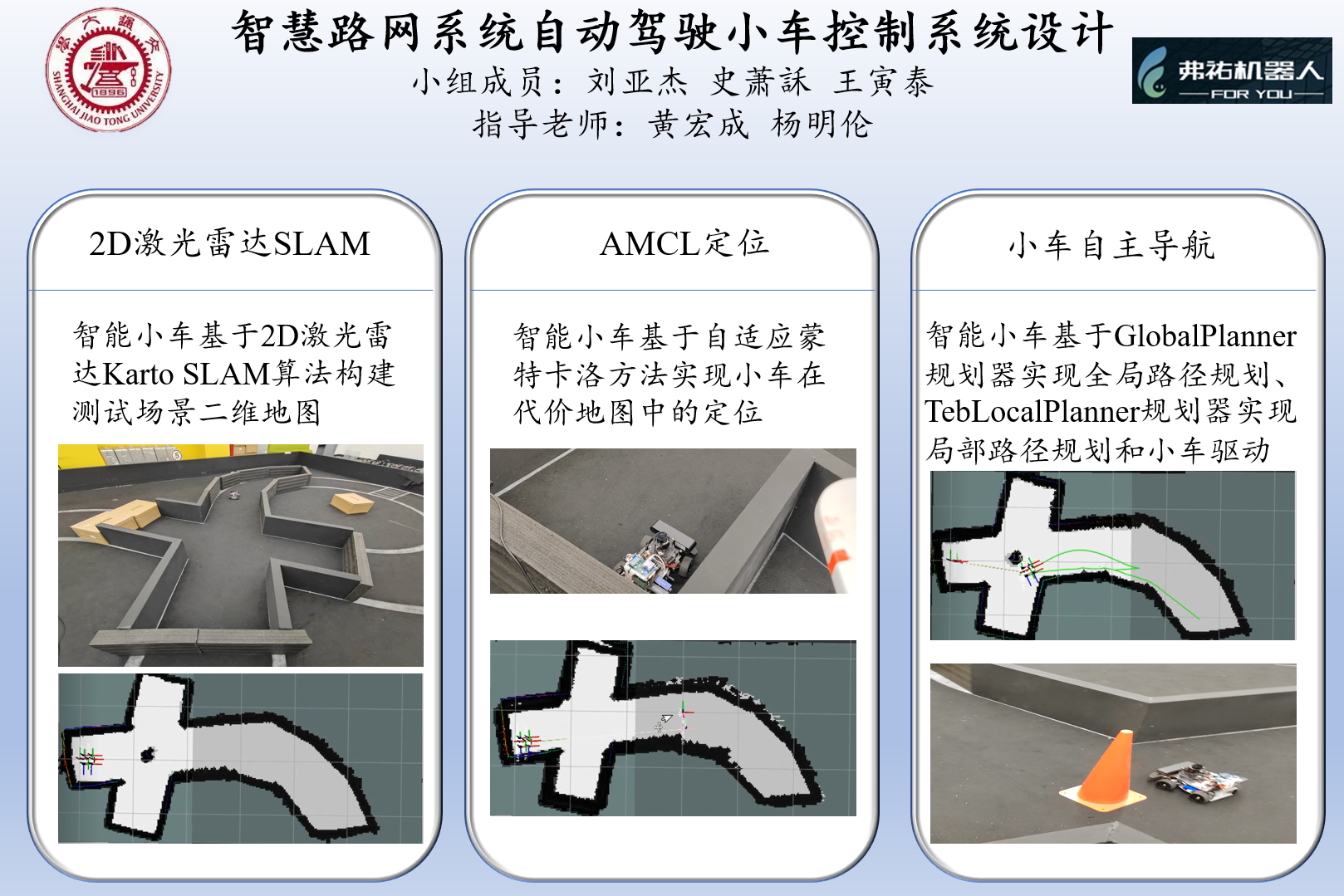
最終小車能夠完成以下任務(wù):一,通過視覺識(shí)別獲取道路車道線的位置和走向,不斷調(diào)整前進(jìn)方向,小車能夠在車道線內(nèi)行駛;二,通過計(jì)算機(jī)視覺中的物體識(shí)別算法實(shí)現(xiàn)道路中交通信號(hào)的識(shí)別,并根據(jù)識(shí)別到的信號(hào)調(diào)整小車速度,例如識(shí)別到紅燈停下來,識(shí)別到ETC通道加速通過;三,通過激光雷達(dá)SLAM技術(shù)實(shí)現(xiàn)跑道周圍環(huán)境的建圖,顯示小車當(dāng)前位置,并能夠完成不同位置之間的路徑規(guī)劃,同時(shí)檢測(cè)道路中的障礙物,當(dāng)識(shí)別到障礙物時(shí)使小車停止運(yùn)動(dòng)。




