

機器視覺+雷達農業(yè)機器人對行作業(yè)系統(tǒng)設計
機械工程
資助企業(yè):
 山東聯(lián)誠農業(yè)裝備有限公司
山東聯(lián)誠農業(yè)裝備有限公司
資助年份: 2024
企業(yè)導師: 蔣磊

指導教師: 李彥明
項目成員: 曹博 劉暢 羅雋聃 李廣達
 項目海報
項目海報

 項目視頻
項目簡介
項目視頻
項目簡介
項目概述
本項目致力于開發(fā)一種高度自動化的農業(yè)機器人,結合機器視覺與雷達技術,專門用于解決農業(yè)領域的除草耕作問題。該機器人針對非結構化的農田環(huán)境,通過整合先進的視覺傳感器、激光雷達(LIDAR)、北斗衛(wèi)星定位系統(tǒng)以及4G云平臺技術,不僅能夠提升作業(yè)效率和精度,還能顯著減少對人工的依賴。此外,項目的開展還響應了國家對智慧農業(yè)發(fā)展的戰(zhàn)略需求,旨在推動農業(yè)生產自動化和信息化的進程。
項目目標
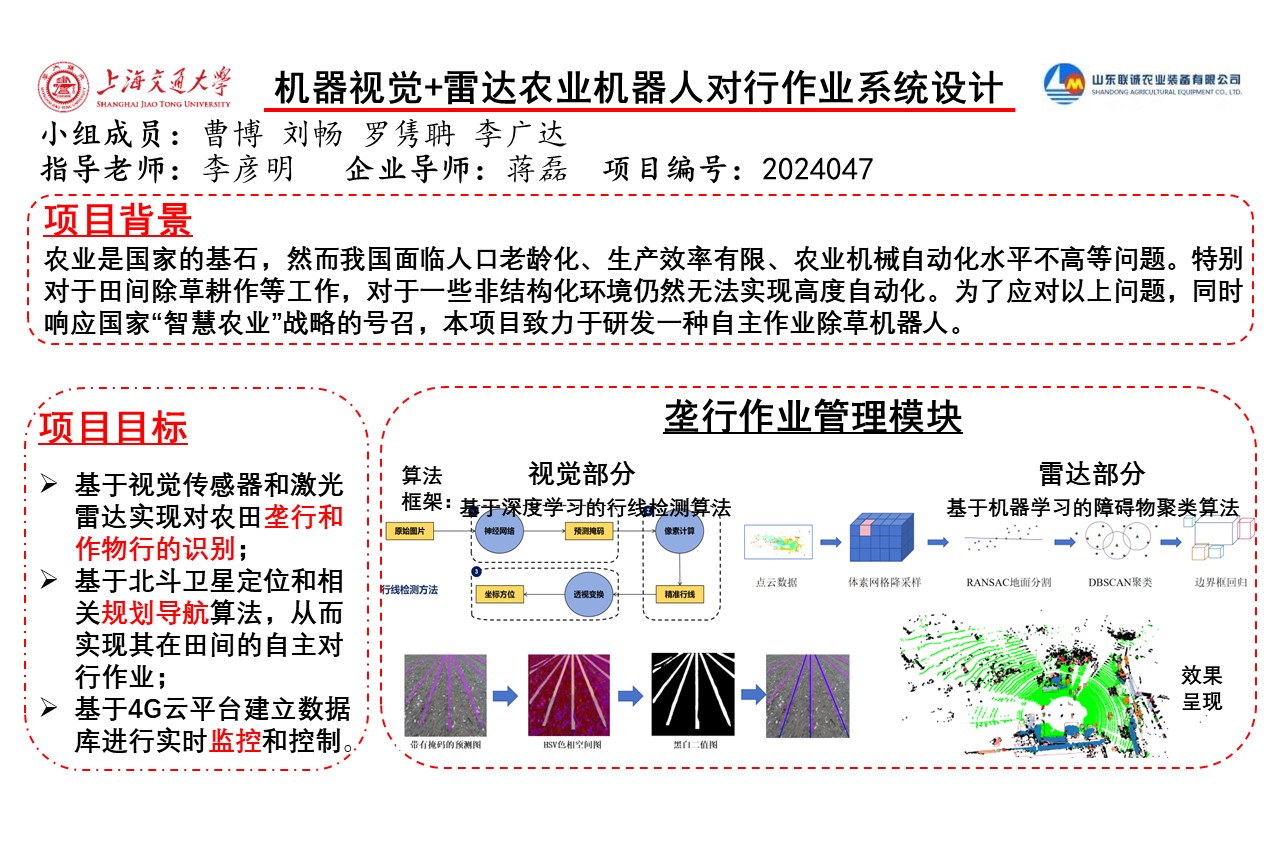
1、環(huán)境感知與作物識別: 本項目的核心在于運用機器視覺和激光雷達技術,精準識別農田中的壟行和作物行,提高作業(yè)的準確性。
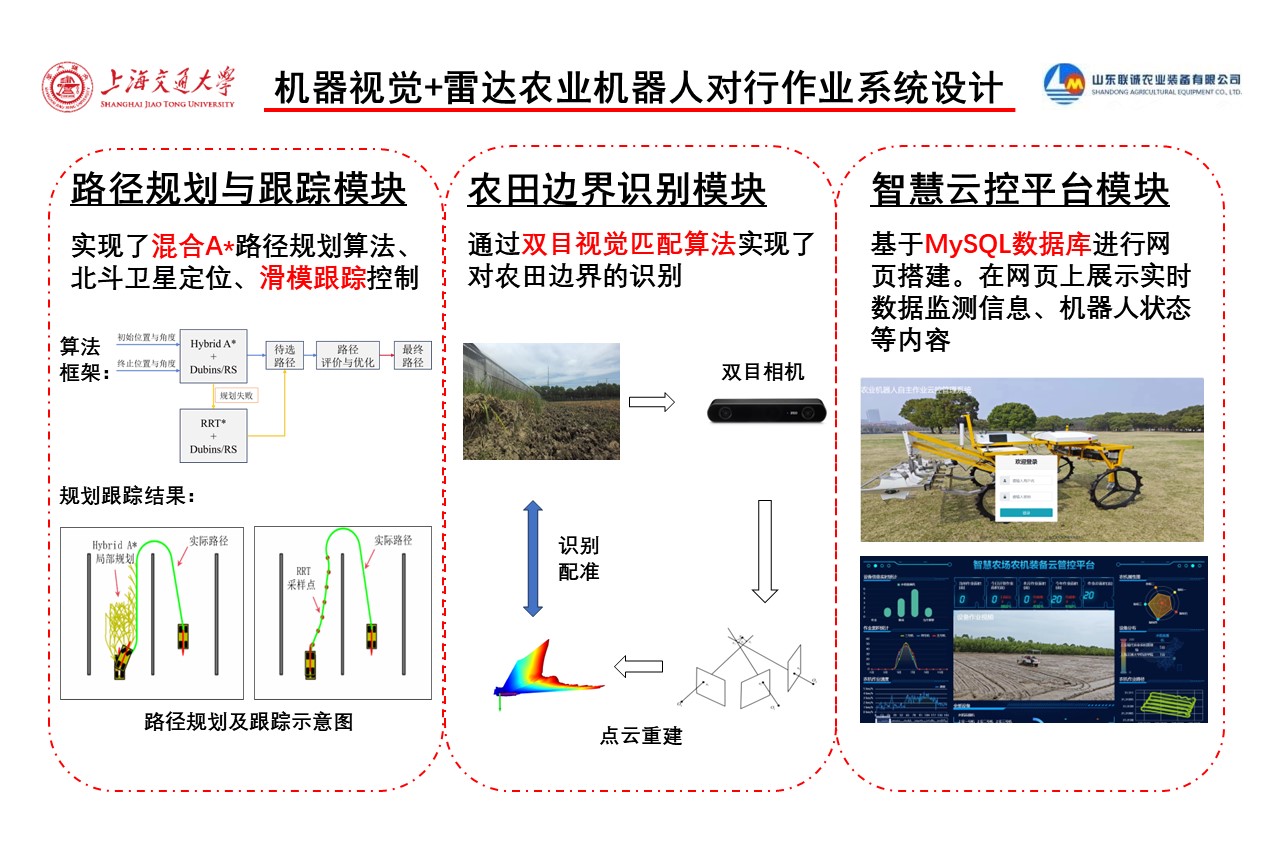
2、自主導航與作業(yè): 通過混合A*路徑規(guī)劃算法和北斗衛(wèi)星定位技術,實現(xiàn)機器人在復雜農田環(huán)境中的自主導航和精確作業(yè),從而優(yōu)化作業(yè)路徑和提高作業(yè)效率。
3、智慧監(jiān)控與數(shù)據(jù)管理: 建立一個基于4G云平臺的數(shù)據(jù)管理和監(jiān)控系統(tǒng),實時監(jiān)控作業(yè)過程,收集作業(yè)數(shù)據(jù),進行數(shù)據(jù)分析,以支持決策制定和作業(yè)流程的持續(xù)優(yōu)化。
項目成果
1、技術實現(xiàn)與應用: 項目成功開發(fā)并整合了基于深度學習的行線檢測算法和基于機器學習的障礙物聚類算法,提升了機器人在田間作業(yè)的智能化水平。
2、作業(yè)效率和精度的提升: 通過實現(xiàn)農田邊界的自動識別及非結構化環(huán)境下的精準除草作業(yè),顯著提升了農業(yè)生產效率和作業(yè)精度,減少了資源浪費。
4、監(jiān)控與控制平臺的建設: 開發(fā)了一個基于MySQL的智慧云控平臺,不僅能在網(wǎng)頁上實時展示數(shù)據(jù)監(jiān)控信息和機器人的工作狀態(tài),還能提供操作者以直觀的管理界面,增強了作業(yè)的可控性和透明度。




