

基于多模態(tài)感知的AMR定位與導(dǎo)航研究
機(jī)械工程資助企業(yè): 上汽大眾汽車有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 孟偉

指導(dǎo)教師: 曹其新
項(xiàng)目成員: 邵亦楊、嚴(yán)盛成、張梓欣
 項(xiàng)目海報(bào)
項(xiàng)目海報(bào)

 項(xiàng)目視頻
項(xiàng)目視頻
 項(xiàng)目簡(jiǎn)介
項(xiàng)目簡(jiǎn)介
項(xiàng)目概述
AMR是一種能夠在沒(méi)有人工干預(yù)的情況下自主執(zhí)行任務(wù)的機(jī)器人。自主移動(dòng)機(jī)器人在工業(yè)自動(dòng)化、倉(cāng)儲(chǔ)物流等領(lǐng)域的應(yīng)用日益廣泛,其定位與導(dǎo)航技術(shù)的精準(zhǔn)性和效率對(duì)其應(yīng)用效果至關(guān)重要,在上汽大眾等大規(guī)模工廠中,普遍存在用于物流系統(tǒng)的AMR以提高生產(chǎn)效率。
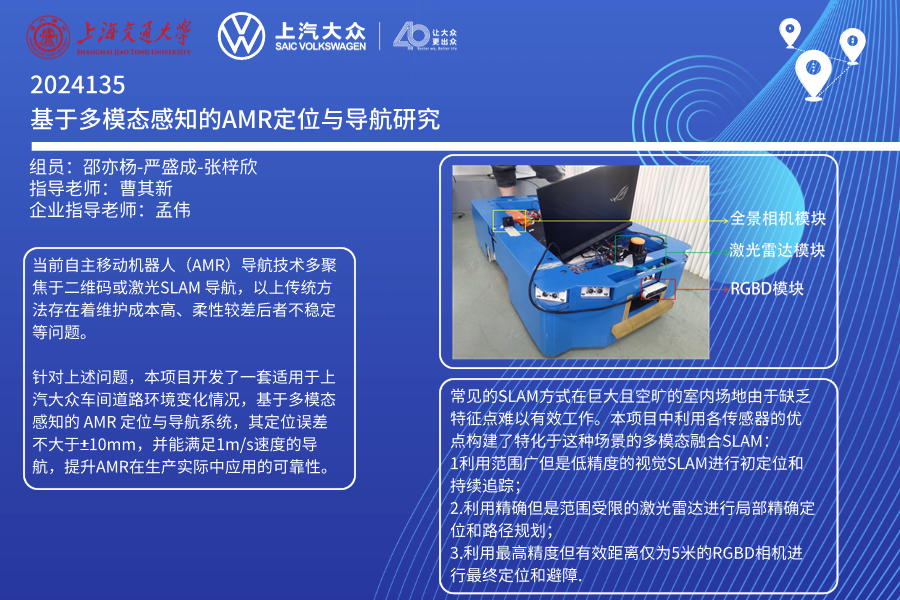
當(dāng)前的應(yīng)用于物流系統(tǒng)的AMR在技術(shù)上普遍依賴于固定導(dǎo)航點(diǎn)和標(biāo)識(shí),如基于射頻識(shí)別技術(shù)(RFID)的導(dǎo)航與定位技術(shù),和基于二維碼+相機(jī)的導(dǎo)航與定位技術(shù),在工作任務(wù)發(fā)生變化時(shí),由于路線的不同,需要重新布置標(biāo)識(shí),費(fèi)時(shí)費(fèi)力,因此需要開發(fā)一套更靈活的自主導(dǎo)航與定位系統(tǒng),以應(yīng)對(duì)生產(chǎn)任務(wù)的變化。
項(xiàng)目目標(biāo)
基于單個(gè)傳感器的 SLAM 系統(tǒng)很難解決上汽大眾工廠內(nèi)車間規(guī)模極大,車間空曠,缺乏特征點(diǎn)和人員設(shè)備流動(dòng)復(fù)雜的這些技術(shù)難點(diǎn)。因此本項(xiàng)目的研究目的在于針對(duì)上汽大眾工廠內(nèi)車間的特點(diǎn),使用多種傳感器,通過(guò)多模態(tài)融合技術(shù)使得 AMR 在復(fù)雜的工廠場(chǎng)景中實(shí)現(xiàn)更加靈活的定位與導(dǎo)航功能
項(xiàng)目擬開發(fā)一套適用于上汽大眾車間道路環(huán)境變化情況,基于多模態(tài)感知的自主導(dǎo)航移動(dòng)機(jī)器人(AMR)定位與導(dǎo)航系統(tǒng)。要求其定位誤差不大于±10mm,并能滿足1m/s速度的導(dǎo)航,滿足上汽大眾工業(yè)生產(chǎn)的需要,并提升AMR在生產(chǎn)實(shí)際中應(yīng)用的可靠性。
項(xiàng)目成果
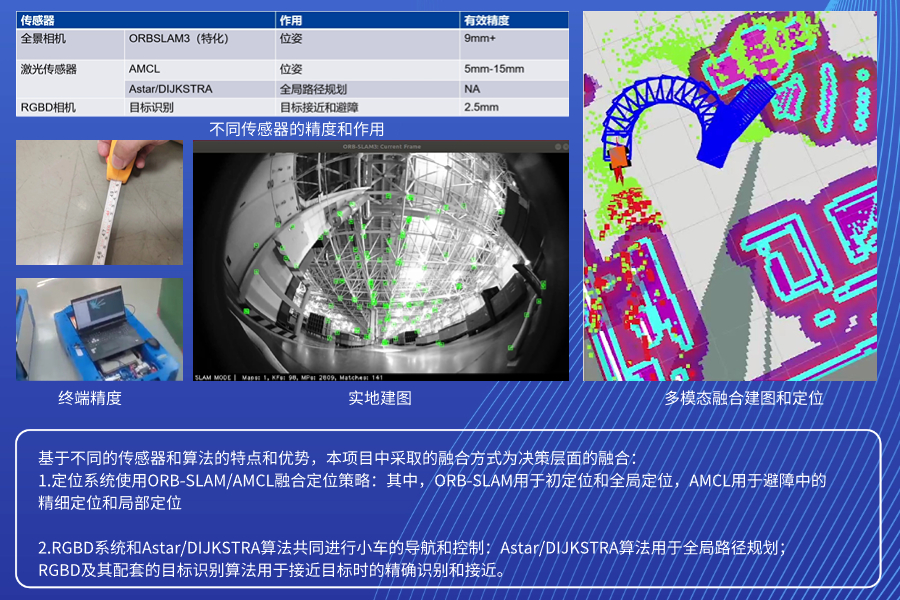
項(xiàng)目開發(fā)了一套基于多傳感器融合的AMR自動(dòng)機(jī)器人SLAM系統(tǒng)。該系統(tǒng)能夠適應(yīng)上海大眾汽車工廠的復(fù)雜狀況,并在此情況下達(dá)到5mm的定位精度,高于項(xiàng)目目標(biāo)的要求,并實(shí)現(xiàn)長(zhǎng)時(shí)間持續(xù)穩(wěn)定工作。
AMR采用多傳感器融合的方式來(lái)實(shí)現(xiàn)良好的定位,導(dǎo)航,SLAM建圖與避障工作,采用全景相機(jī)、RGBD相機(jī)、激光雷達(dá)三種傳感器,其中:RGBD感知節(jié)點(diǎn)負(fù)責(zé)感知周圍的移動(dòng)障礙以及車道線等標(biāo)識(shí)物,用于避障和精確定位操作;全景相機(jī)SLAM節(jié)點(diǎn)負(fù)責(zé)導(dǎo)航地圖的構(gòu)建,初定位以及機(jī)器人位姿跟蹤;激光SLAM節(jié)點(diǎn)負(fù)責(zé)感知近距離的障礙,對(duì)AMR的緊急避障和方向修正進(jìn)行決策。




