

電泳車身表面缺陷自動打磨
機(jī)械工程資助企業(yè): 上汽大眾汽車有限公司
資助年份: 2024
企業(yè)導(dǎo)師: 卞奇立

指導(dǎo)教師: 張波
項目成員: 譚彥博、李宗森、朱文鑠
 項目海報
項目海報

 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
汽車車身經(jīng)過電泳工藝后有存在缺陷的可能,以往的做法是經(jīng)過電泳工藝后由機(jī)器人對整個車身進(jìn)行拋光去除缺陷,該方法不能精確的定位缺陷位置點,需要對整個車身進(jìn)行拋光,帶來效率低下問題。為了提高電泳車身的質(zhì)量控制水平,傳統(tǒng)的人工檢測打磨方法已經(jīng)不能滿足高效、準(zhǔn)確的需求。本項目提出視覺精確定位缺陷位置-機(jī)器人自主規(guī)劃拋光軌跡-機(jī)器人力控拋光的方式,提升機(jī)器人拋光效率。根據(jù)企業(yè)需求與技術(shù)分析,將項目分解為三個子項目,分別聚焦視覺缺陷檢測定位、協(xié)作機(jī)器人路徑自動規(guī)劃、協(xié)作機(jī)器人缺陷自動打磨。
項目目標(biāo)
完成視覺檢測和拋光實驗平臺的搭建。首先是搭建基于2.5D的視覺檢測平臺和實現(xiàn)缺陷檢測的功能,通過缺陷檢測的機(jī)器學(xué)習(xí)方法,得到相關(guān)缺陷數(shù)據(jù)坐標(biāo)。然后是機(jī)器人拋光路徑優(yōu)化,機(jī)器人根據(jù)視覺系統(tǒng)檢測的缺陷位置和類型,優(yōu)化拋光過程的軌跡,確保缺陷被去除,同時考慮系統(tǒng)避障功能。最后是拋光實驗平臺搭建,包括力控機(jī)器人、前端拋光工具,能夠進(jìn)行拋光實驗驗證,從而實現(xiàn)機(jī)器人曲面恒力跟蹤方法及拋光驗證,對拋光任務(wù)進(jìn)行規(guī)劃與優(yōu)化,增強(qiáng)任務(wù)的魯棒性。
項目成果
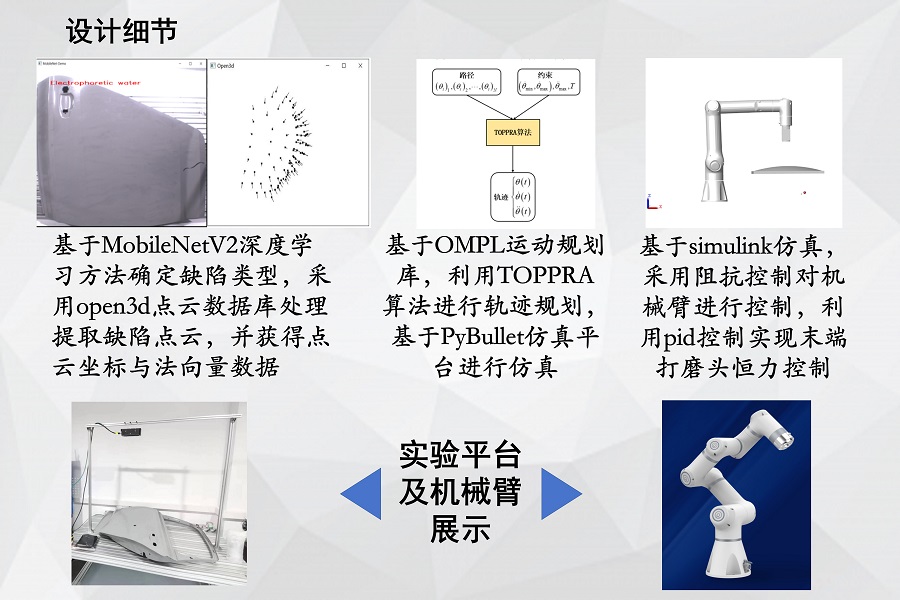
完成了視覺檢測平臺的搭建,并提取相關(guān)缺陷樣本;采用MobileNet模型對缺陷數(shù)據(jù)集進(jìn)行了訓(xùn)練與類型獲取;采用open3d庫進(jìn)行了點云預(yù)處理、配準(zhǔn)、坐標(biāo)與法向量數(shù)據(jù)獲取。搭建了基于視覺檢測、力控拋光的實驗驗證平臺;利用TOPPRA算法實現(xiàn)了機(jī)器人拋光路徑和時間優(yōu)化,同時考慮到了系統(tǒng)避障功能;以車門為研究對象,利用PyBullet仿真驗證與實驗平臺驗證。在simulink中進(jìn)行了末端執(zhí)行器恒力控制的代碼實現(xiàn)和調(diào)試,通過pid控制實現(xiàn)了機(jī)械臂恒力打磨,同時在實驗平臺進(jìn)行了恒力拋光的驗證。




