

電磁抓手設計關鍵因素研究
能源與動力工程
資助企業(yè):
 上海橋田智能設備有限公司
上海橋田智能設備有限公司
資助年份: 2025
企業(yè)導師: 陳坤

指導教師: 張亞歐
項目成員: 周桓任 熊驍 張惟捷
 項目海報
項目海報


 項目視頻
項目視頻
 項目簡介
項目簡介
項目概述
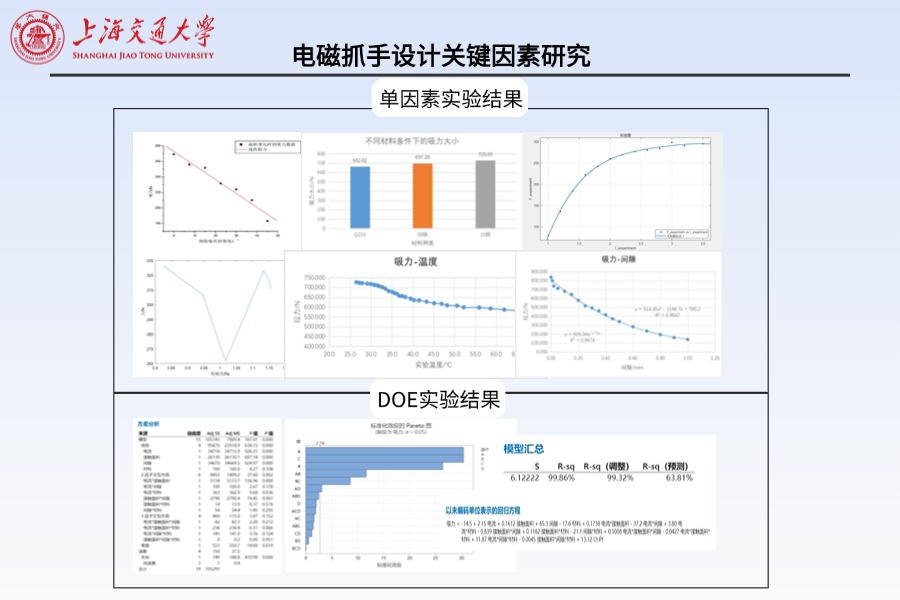
在智能制造等工業(yè)領域中,電磁抓手因其非接觸式操作優(yōu)勢得到了廣泛的應用。但其吸附力難以直接觀測的特性易引發(fā)過熱、過載等潛在安全隱患,造成抓取物脫落等現(xiàn)象,直接影響工件抓取穩(wěn)定性與生產安全性。因此,探究電磁抓手吸力的影響因素為進一步優(yōu)化電磁抓手的性能,以適應不同工作場景起到了至關重要的作用。本項目針對橋田智能設備有限公司開發(fā)的EMG電磁抓手設備,通過完成理論分析、實驗驗證和建模仿真,系統(tǒng)揭示了溫度與間隙、接觸界面材料特性以及勵磁參數(shù)對吸附力的動態(tài)影響機制。基于以上探究設計并完成DOE 實驗,提出優(yōu)化設計方案。最終提出一套適用于多種工業(yè)場景的電磁抓手設計方案。
項目目標
(1) 實驗驗證多種環(huán)境條件下的熱-磁耦合關系,測試不同溫度和間隙組合下吸力的變化情況,對比修正溫度和間隙-吸力模型。
(2) 完成接觸面積、粗糙度與工件材料特性對吸力關系的有限元仿真,分析得到不同接觸面積與材料特性條件下的磁場分布特性。
(3) 實驗驗證接觸面積、粗糙度與材料特性的影響規(guī)律,測試多種接觸面積與材料特性組合下的吸力變化情況,對比修正接觸面積和材料特性-吸力模型。
(4) 完成勵磁電流對吸力關系的有限元仿真,得到勵磁電流與吸力之間的擬合曲線。
(5) 實驗驗證勵磁電流大小的影響規(guī)律,測試不同勵磁條件下的吸力變化情況,對比修正勵磁電流-吸力模型。
(6) 基于仿真與測試結論,針對關鍵因素設計并完成DOE實驗,根據(jù)各因素耦合作用對電磁抓手吸力的影響情況,探究影響抓手吸力的決定性因素。
(7) 綜合考慮六個主要影響因素,基于DOE實驗情況,提出針對不同實際工況下電磁抓手的控制策略,以提升抓手對于不同任務種類的適應性。
項目成果
本項目系統(tǒng)研究了溫度、間隙、接觸特性、材料屬性等多因素耦合作用對電磁抓手吸附力的影響機制,通過有限元仿真與實驗測試相結合的方法,建立關鍵參數(shù)與吸附力的定量關系模型,最終形成適應不同工況的電磁抓手優(yōu)化控制策略。其意義在于提升電磁抓手在復雜工業(yè)環(huán)境中的吸附穩(wěn)定性與安全可靠性,有效解決因吸力不足導致的工件脫落問題,助力橋田公司突破電磁抓手的核心技術瓶頸,增強其在智能制造領域的市場競爭力。




