
6月18日,上海交通大學(xué)2022屆優(yōu)異學(xué)士學(xué)位論文(TOP1%)正式揭曉,機(jī)械與動(dòng)力工程學(xué)院龔超越、楊之遠(yuǎn)、尹昊、毛雨軒4位學(xué)子獲評(píng)。
姓名 | 指導(dǎo)教師 | 獲獎(jiǎng)?wù)撐?/p> |
龔超越 | 尹俊連 | 微氣泡可視化測(cè)量與三維形貌重建的方法研究 |
楊之遠(yuǎn) | 盛鑫軍 | 介入器械操控機(jī)器人機(jī)構(gòu)設(shè)計(jì)與開發(fā) |
尹昊 | 朱翀 | 基于 RC 熱阻網(wǎng)絡(luò)的電動(dòng)汽車車載充電模塊溫升模型構(gòu)建 |
毛雨軒 | 陳曉軍 | PET/CT 用人體呼吸運(yùn)動(dòng)信息分析系統(tǒng)研發(fā) |
為進(jìn)一步推進(jìn)校企產(chǎn)學(xué)結(jié)合的工程教育模式改革,學(xué)院自2017屆起對(duì)畢業(yè)設(shè)計(jì)(論文)進(jìn)行試點(diǎn)改革,改革后的本科畢業(yè)設(shè)計(jì)以項(xiàng)目的形式組織實(shí)施,圍繞本科畢業(yè)設(shè)計(jì)要求,緊密結(jié)合企業(yè)實(shí)際研發(fā)需求,協(xié)作解決來自企業(yè)的實(shí)際應(yīng)用問題。2022屆本科生畢業(yè)設(shè)計(jì)(論文)評(píng)選活動(dòng)中,學(xué)院推薦了5位學(xué)子參選,學(xué)校從論文的難度、工作量、研究過程、研究結(jié)果以及答辯表現(xiàn)各方面綜合考察學(xué)生素質(zhì), 最終4位學(xué)子獲此榮譽(yù)。
附:優(yōu)異學(xué)士學(xué)位論文簡(jiǎn)介
學(xué)生姓名:龔超越
指導(dǎo)教師:尹俊連
論文題目:微氣泡可視化測(cè)量與三維形貌重建的方法研究
論文簡(jiǎn)介:
對(duì)于泡狀流的研究依賴于對(duì)實(shí)驗(yàn)氣泡信息的提取與分析,目前常用方法是使用高速攝像機(jī)與圖像處理相結(jié)合的方式對(duì)微氣泡信息進(jìn)行提取,然而該方法往往依賴于氣泡圖像的剪影而拋棄了圖像中豐富的灰度信息。論文提出了一種使用單相機(jī)圖像中的灰度信息并重建為氣泡單側(cè)形狀的方法,獲得了復(fù)雜氣泡界面的三維形態(tài),與二維的表征方法相比,測(cè)量精度提高了一個(gè)等級(jí)。
學(xué)生姓名:楊之遠(yuǎn)
指導(dǎo)教師:盛鑫軍
論文題目:介入器械操控機(jī)器人機(jī)構(gòu)設(shè)計(jì)與開發(fā)
論文簡(jiǎn)介:
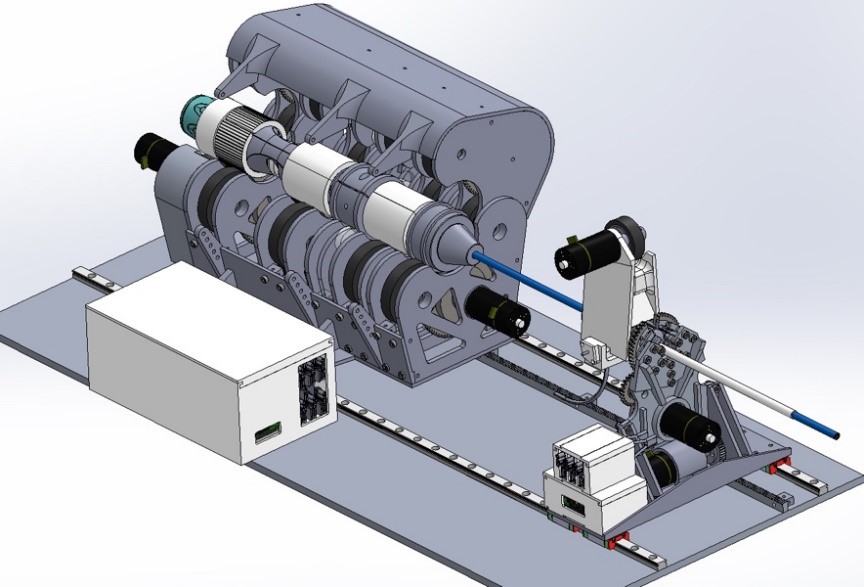
摩擦輪控制方案總裝圖
論文主要研究用于控制器械前端的介入器械操控機(jī)構(gòu),并提出兩種核心思路對(duì)原系統(tǒng)進(jìn)行控制,分別是基于摩擦輪驅(qū)動(dòng)的可拆卸介入器械操控裝置,以及基于活動(dòng)槽口的分體式介入器械操控裝置。論文提供了非定位的摩擦輪操控裝置與定位的活動(dòng)槽口分體式操控裝置兩種創(chuàng)新方案,均為心臟介入器械自動(dòng)輸送系統(tǒng)操控裝置提供了一種可行的機(jī)構(gòu)原型。
學(xué)生姓名:尹昊
指導(dǎo)教師:朱翀
論文題目:基于RC熱阻網(wǎng)絡(luò)的電動(dòng)汽車車載充電模塊溫升模型構(gòu)建
論文簡(jiǎn)介:
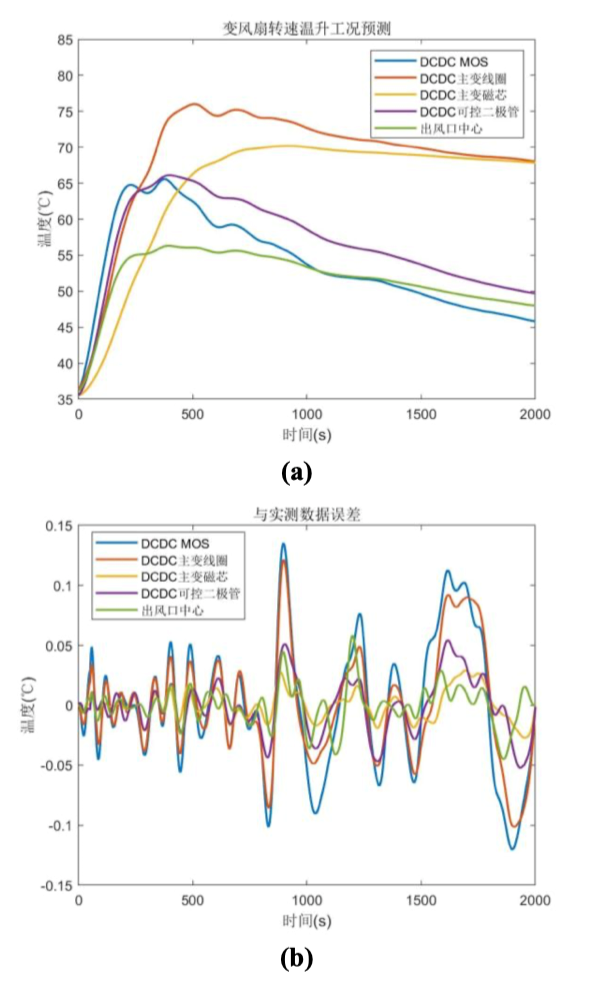
包含耦合非線性函數(shù)庫的溫升重構(gòu) (a)重構(gòu)曲線 (b)與實(shí)驗(yàn)數(shù)據(jù)誤差
為了較為精確地預(yù)測(cè)充電模塊各工況下的溫度分布,建立風(fēng)扇轉(zhuǎn)速控制對(duì)器件溫度分布的影響關(guān)系,論文圍繞熱阻網(wǎng)絡(luò)模型建立以及熱網(wǎng)絡(luò)參數(shù)辨識(shí)展開了研究,基于傳熱學(xué)原理推導(dǎo)出節(jié)點(diǎn)間的熱傳導(dǎo)關(guān)系,建立了節(jié)點(diǎn)間的 RC 熱網(wǎng)絡(luò)模型。論文將各種新型數(shù)據(jù)驅(qū)動(dòng)方法引入復(fù)雜系統(tǒng)的熱網(wǎng)絡(luò)辨識(shí)中,避免了傳統(tǒng)熱模型建立中復(fù)雜的計(jì)算推導(dǎo)和仿真模擬,可達(dá)到更好的精度,有助于風(fēng)扇轉(zhuǎn)速的合理控制,降低噪聲、延長(zhǎng)使用壽命。
學(xué)生姓名:毛雨軒
指導(dǎo)教師:陳曉軍
論文題目:PET/CT 用人體呼吸運(yùn)動(dòng)信息分析系統(tǒng)研發(fā)
論文簡(jiǎn)介:
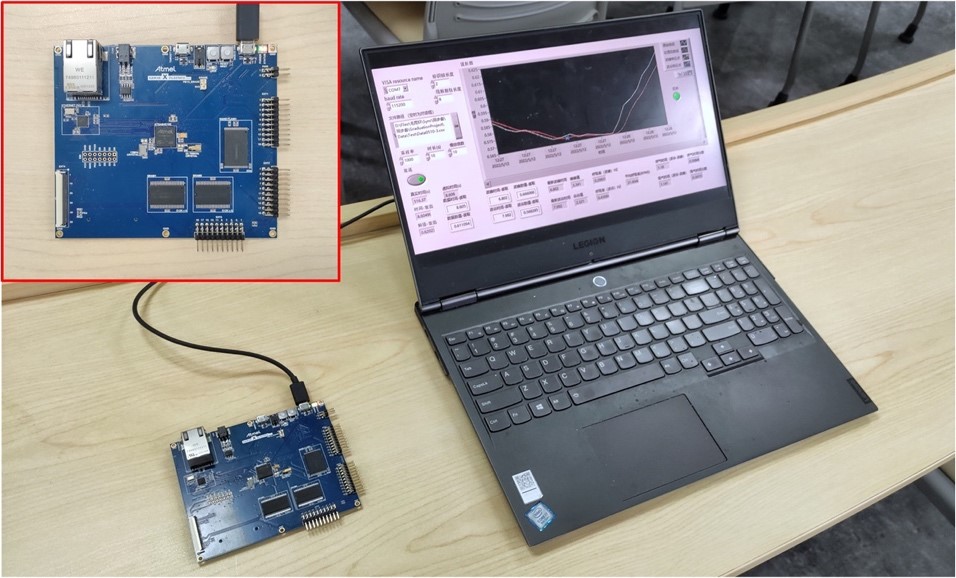
整體系統(tǒng)實(shí)驗(yàn)的設(shè)備和場(chǎng)景
在臨床診斷或治療中,患者的呼吸運(yùn)動(dòng)會(huì)引入位置誤差,為胸腹部疾病的診斷和治療帶來較大難度。論文從理論上提出了一種基于時(shí)域信號(hào)的呼吸運(yùn)動(dòng)信息分析模型,設(shè)計(jì)了一系列從復(fù)雜原始信號(hào)中提取呼吸狀態(tài)、呼吸波形、呼吸時(shí)相和呼吸功能參數(shù)信息的方法,并結(jié)合實(shí)際 PET/CT 設(shè)備掃描時(shí)的應(yīng)用場(chǎng)景,搭建了一套低延時(shí)、低成本、在線處理、與 PET/CT 流程兼容的呼吸信息分析系統(tǒng),包括基于小型嵌入式設(shè)備的下位機(jī)程序和基于 LabVIEW 的上位機(jī)軟件環(huán)境。

Email: me_oue@sjtu.edu.cn
地址:上海市東川路800號(hào)閔行機(jī)械樓A103
郵編:200240





