搜索:

近日,機(jī)械與動(dòng)力工程學(xué)院張文明教授團(tuán)隊(duì)在Advanced Functional Materials上發(fā)表了題為“Hierarchically Reconfigurable Soft Robots with Reprogrammable Multimodal Actuation”的研究論文,針對(duì)軟體機(jī)器人首次提出了一種分級(jí)可重構(gòu)的策略,并通過(guò)仿真、理論和實(shí)驗(yàn)揭示了彈性引導(dǎo)的多模式運(yùn)動(dòng)機(jī)理。該設(shè)計(jì)策略克服了以往模塊化軟體機(jī)器人運(yùn)動(dòng)模式不可改變的缺陷,將模塊化的設(shè)計(jì)方法提升到了更高的維度。論文第一作者是博士生房付熠,通訊作者是張文明教授和同濟(jì)大學(xué)航空航天與力學(xué)學(xué)院李汶柏研究員。
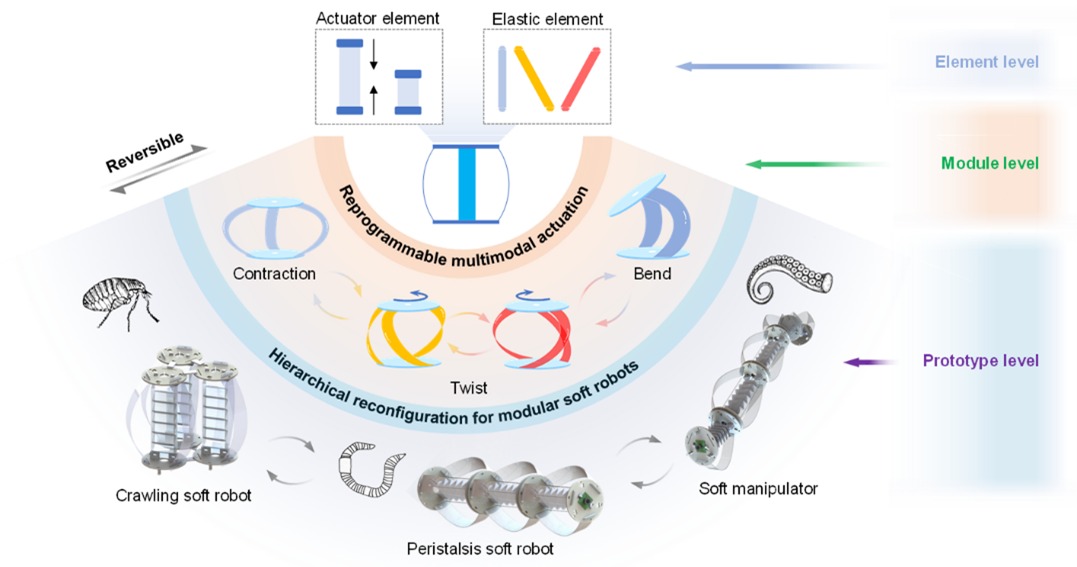
可重構(gòu)軟機(jī)器人在應(yīng)對(duì)復(fù)雜環(huán)境和多變?nèi)蝿?wù)時(shí)表現(xiàn)出卓越的靈活性和適應(yīng)性。然而,傳統(tǒng)的可重構(gòu)設(shè)計(jì)策略是基于特定結(jié)構(gòu)和有限運(yùn)動(dòng)模式的軟體模塊,其可重構(gòu)性或可擴(kuò)展性受限。針對(duì)該問(wèn)題,研究團(tuán)隊(duì)提出了一種分層可重構(gòu)策略,不僅具備傳統(tǒng)模塊化機(jī)器人的功能,即通過(guò)模塊間的組合構(gòu)建不同的機(jī)器人,還能通過(guò)重編程模塊內(nèi)的彈性引導(dǎo)元件,實(shí)現(xiàn)模塊的多種運(yùn)動(dòng)模式。
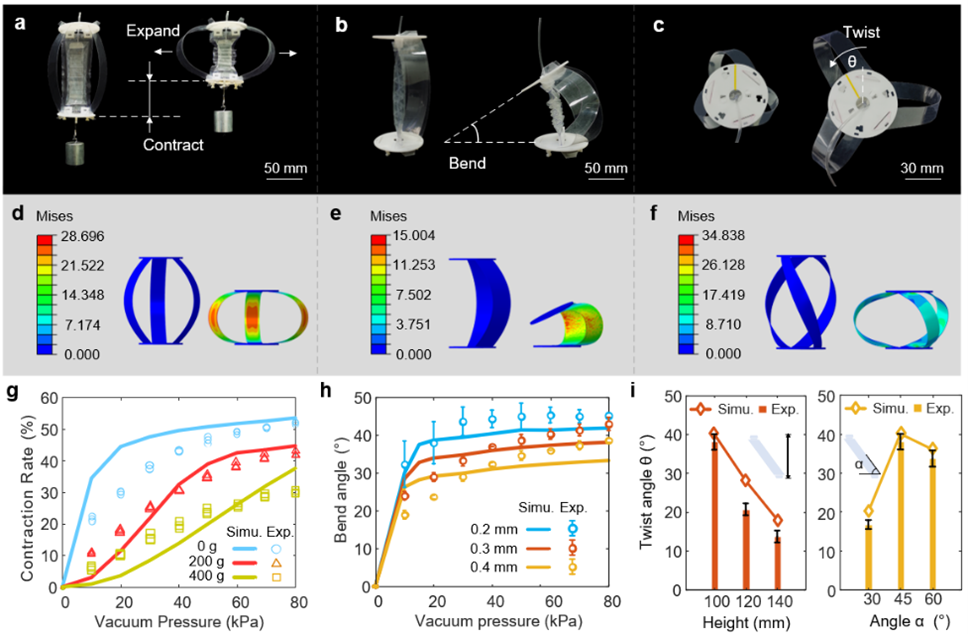
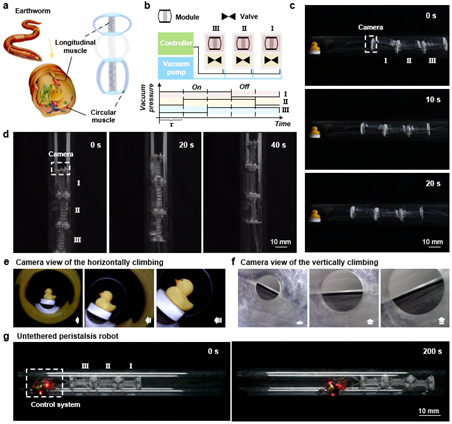
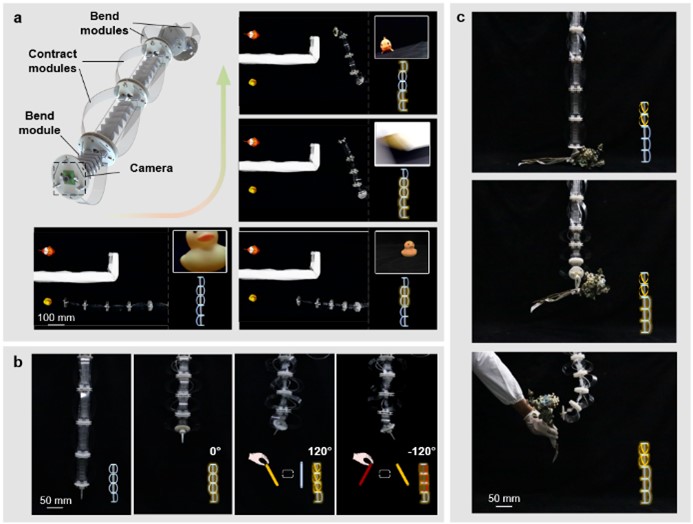
團(tuán)隊(duì)對(duì)收縮、彎曲、扭轉(zhuǎn)三種基本的運(yùn)動(dòng)模式進(jìn)行了仿真和實(shí)驗(yàn)研究,分別關(guān)注了負(fù)載以及彈性梁的尺寸參數(shù)對(duì)驅(qū)動(dòng)性能的影響,并建立了設(shè)計(jì)參數(shù)與輸出性能之間的聯(lián)系,為軟體模塊的逆向設(shè)計(jì)提供了基礎(chǔ)。利用這些模塊,團(tuán)隊(duì)構(gòu)建了仿蠕蟲(chóng)機(jī)器人、平面全向移動(dòng)機(jī)器人、多模式機(jī)械臂等應(yīng)用樣例,其中,仿蠕蟲(chóng)機(jī)器人實(shí)現(xiàn)了無(wú)纜操作和攝像頭搭載,為長(zhǎng)距離管道探測(cè)提供了可能;多模式機(jī)械臂經(jīng)過(guò)模塊運(yùn)動(dòng)模式的重編程,實(shí)現(xiàn)了物體傳遞以及跨障礙探測(cè)等功能。
該研究得到了國(guó)家自然科學(xué)基金項(xiàng)目、機(jī)械系統(tǒng)與振動(dòng)全國(guó)重點(diǎn)實(shí)驗(yàn)室項(xiàng)目、中央高校基本科研業(yè)務(wù)費(fèi)項(xiàng)目、上海高校IV類(lèi)高峰學(xué)科建設(shè)的資助。論文合作者還包括上海交通大學(xué)陳虎越、郭欣宇博士和孟光教授。
論文鏈接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202414279



上海交大
機(jī)械動(dòng)力學(xué)院



上海交大
機(jī)動(dòng)本科教務(wù)辦



SJTU機(jī)動(dòng)研教辦



上海交大
機(jī)動(dòng)校友辦



上海交大MEM



SJTUME基礎(chǔ)實(shí)驗(yàn)與創(chuàng)新實(shí)踐



SJTUME錘錘



上海交大
機(jī)動(dòng)研究生會(huì)



ME微紅旗



ME礪遠(yuǎn)學(xué)術(shù)



SJTUME職業(yè)發(fā)展中心
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄



 地址:上海市東川路800號(hào)上海交通大學(xué)閔行校區(qū)機(jī)械與動(dòng)力工程學(xué)院
地址:上海市東川路800號(hào)上海交通大學(xué)閔行校區(qū)機(jī)械與動(dòng)力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn