
近日,上海交通大學機械與動力工程學院王皓、陳根良團隊在Science Advances上發(fā)表“Soft and lightweight fabric enables powerful and high-range pneumatic actuation”論文,其開發(fā)的“基于織物的輕質(zhì)高強度機器人/機械手”突破了傳統(tǒng)柔性機器人柔順性與承載能力相互制約的瓶頸,通過發(fā)揮織物材料柔軟且抗拉伸的獨特性能,突破現(xiàn)有基于硅橡膠制作柔性機器人的思維慣性,提出具有運動模式可任意編程的輕質(zhì)高強度柔性驅(qū)動單元。該機器人單元同時具備結(jié)構(gòu)順應性、交互友好性以及承載強、質(zhì)量輕、精度高、工作空間大等優(yōu)點,將剛性與柔性機器人各自的優(yōu)點有機結(jié)合。陳根良教授與西湖大學工學院姜漢卿教授為本文共同通訊作者,上海交通大學博士畢業(yè)生、西湖大學博士后張壯和上海交通大學博士生龍泳舟為共同第一作者。
在當前電、熱、光、磁等多種柔性機器人的驅(qū)動方法中,氣動驅(qū)動因其簡單、安全的操作特點,以及低成本、易于制造等固有優(yōu)勢,成為了柔性機器人最常用且可靠的驅(qū)動方式。氣動柔性機器人大多基于彈性硅膠材料構(gòu)建,在氣動作用下通過硅膠材料拉伸變形實現(xiàn)運動輸出。此類設(shè)計雖然具有自身結(jié)構(gòu)順應性而帶來的優(yōu)異的交互性,但也同樣導致其運動易受外力干擾,難以實現(xiàn)承載與高精度運動控制。針對該問題,研究團隊從力學原理出發(fā),從根本上突破目前柔性機器人的固有思維定式,即不采用硅膠軟材料,而是基于“柔而抗拉”材料、設(shè)計并構(gòu)造具有多運動模式和高承載能力的氣動柔性機器人。
基于織物材料的柔性機器人驅(qū)動器構(gòu)造方法
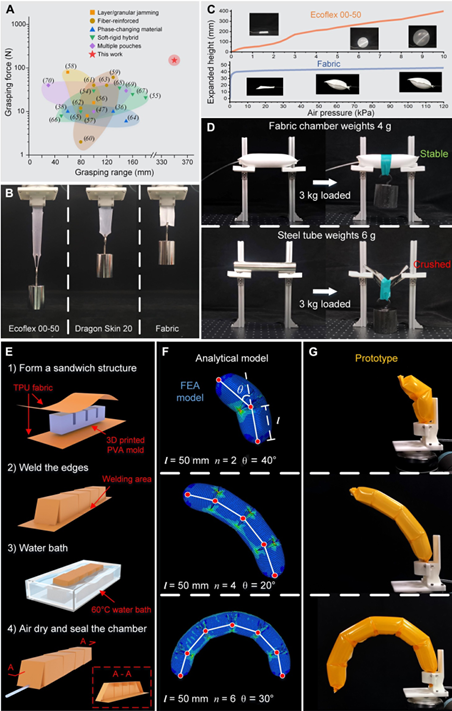
該設(shè)計發(fā)揮織物材料柔軟而抗拉伸的獨特性能,通過TPU熱粘合工藝,構(gòu)建封閉織物氣腔在正壓氣源作用下,兼具氣動軟體驅(qū)動的柔順性以及如同氣壓千斤頂般的高承載能力,所制備標準柱形腔體在壓強作用下,具有優(yōu)于相似質(zhì)量鋼管的結(jié)構(gòu)剛度;為進一步使其具備更加豐富的驅(qū)動特性,研究團隊創(chuàng)新性地提出一種基于水溶性內(nèi)模具的氣道構(gòu)建方法,使得所制備柔性機器人的運動可編程且可提前進行精確的建模分析。
可編程且可組合的豐富運動模式
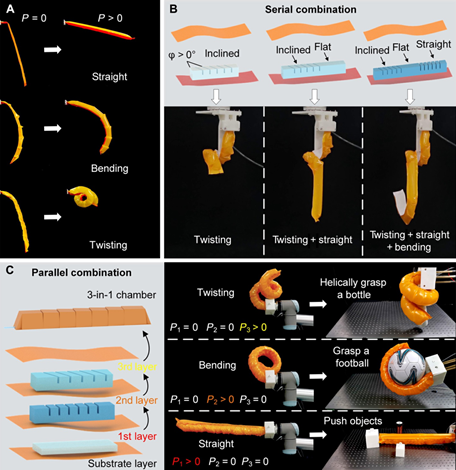
基于上述原理并結(jié)合織物材料柔軟且易于壓縮等特性,通過巧妙設(shè)計,該柔性機器人驅(qū)動可實現(xiàn)直線、彎曲、扭轉(zhuǎn)等多運動模式輸出,且運動模式與輸出力可基于所構(gòu)建模型進行精準預估,進而實現(xiàn)基于模型的幾何參數(shù)設(shè)計。該柔性機器人驅(qū)動還可實現(xiàn)運動模式串聯(lián)和并聯(lián):由于內(nèi)模具可進行任意設(shè)計,多種運動模式可根據(jù)實際需求,分段呈現(xiàn)于單一驅(qū)動單元;同時由于織物材料柔軟且易于壓縮,具有多種不同運動模式的腔體可通過層壓的方法集成于同一驅(qū)動單元,進而實現(xiàn)單驅(qū)動單元多運動模式的自由切換。研究通過將該軟體驅(qū)動單元并聯(lián),構(gòu)建了交互友好型機械手,大幅提升了現(xiàn)有柔性機械手的抓取范圍與承載能力,進一步拓展了柔性機械臂、機械手在生產(chǎn)生活中的應用范圍。與此同時,該工作為基于織物材料建造柔性機器人提供了指導方案,為將先進纖維、紡織技術(shù)引入機器人應用提供了無限可能。
研究獲得了國家自然科學基金青年項目、優(yōu)青項目,國家重點研發(fā)計劃,以及西湖大學相關(guān)經(jīng)費支持。
原文鏈接:http://www.science.org/doi/10.1126/sciadv.adg1203
 學院OA系統(tǒng)
學院OA系統(tǒng) jAccount登錄
jAccount登錄




































 地址:上海市東川路800號上海交通大學閔行校區(qū)機械與動力工程學院
地址:上海市東川路800號上海交通大學閔行校區(qū)機械與動力工程學院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn