
8月16日,《自然·生物醫(yī)學工程》(Nature Biomedical Engineering)在線發(fā)表了上海交通大學機械與動力工程學院機器人研究所朱向陽、谷國迎教授和麻省理工學院趙選賀教授的合作論文“操作感知一體化的軟體神經(jīng)假肢手”(A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback)。上海交通大學為論文第一作者和通訊作者單位,博士研究生張寧斌為論文共同第一作者。該論文也被Nature以“A tough prosthetic hand obeys the muscles’ commands”為題,作為研究亮點報道。

軟體神經(jīng)假肢手具有六個主動自由度,在氣壓驅動下可實現(xiàn)多種靈巧抓握手勢。每個手指具有內(nèi)嵌多段分布式硬質(zhì)結構層的纖維增強軟體結構,在氣壓驅動下具有一個彎曲自由度。特別是拇指具有一個額外的自由度,用于實現(xiàn)對掌運動。此外,手指固有的柔順性使其在面對柔軟、易碎物體時也能夠進行自適應抓握。
驅動控制硬件設計采用分布式模塊化思路。微型泵、閥、電路板、電池等器件可裝在輕量化腰包中,氣動軟體手指、傳感器等位于機械手本體中,腰包與機械手中的硬件通過隱藏的氣管和電線進行連接。根據(jù)需要,所有器件均可集成于假肢的接收腔內(nèi)。接收腔中嵌入了四個定制的肌電傳感器,用來記錄殘肢目標肌肉的表面肌電信號,并解碼截肢患者的運動意圖。各個軟體手指的指尖內(nèi)置了水凝膠-彈性體混合結構的柔性壓力傳感器,并集成了電觸覺系統(tǒng),具備觸覺壓力等外部感知信息的神經(jīng)反饋功能,可實現(xiàn)假肢手與神經(jīng)系統(tǒng)的雙向閉環(huán)控制。
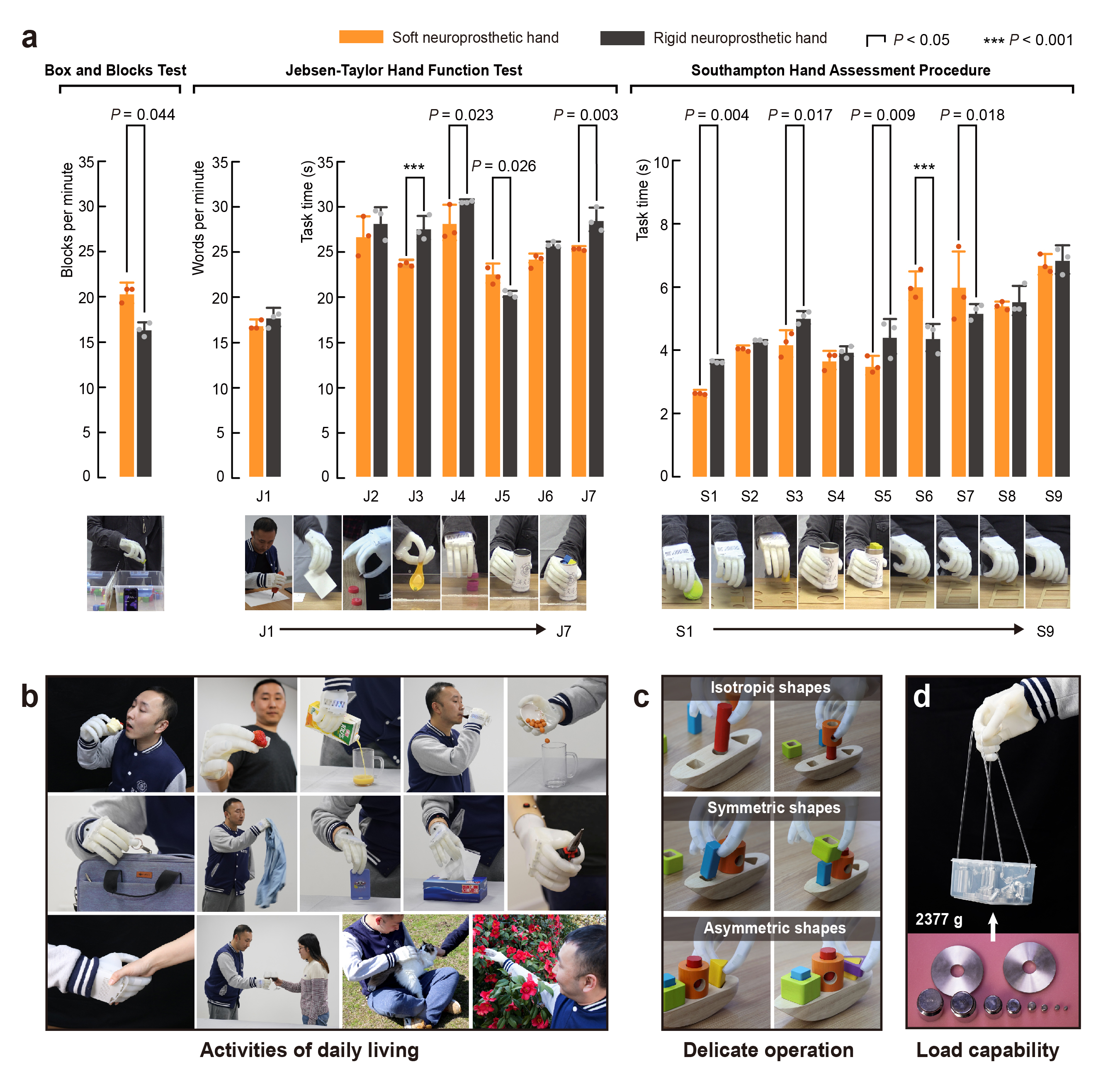
為了評估軟體神經(jīng)假肢手的使用性能,兩位截肢患者按指定范式分別完成了軟體假肢手和剛性假肢手的標準量化測試實驗。實驗結果統(tǒng)計分析表明,軟體假肢手在速度和靈巧性方面優(yōu)于傳統(tǒng)的剛性神經(jīng)假肢。當抓握草莓、面包和紙杯等柔軟、易碎物品時,軟體神經(jīng)假肢手展示了更強的性能優(yōu)勢。此外,因軟體假肢手重量大幅降低,受試者佩戴使用的舒適性明顯提升。
日常生活應用驗證實驗表明,截肢受試者可以控制軟體假肢手抓取和操作食物、日用品、工具等不同的物品,也可以與外界進行握手、觸摸動植物等安全互動交互,完成捏取不同形狀尺寸的物體并進行插槽等精細操作。
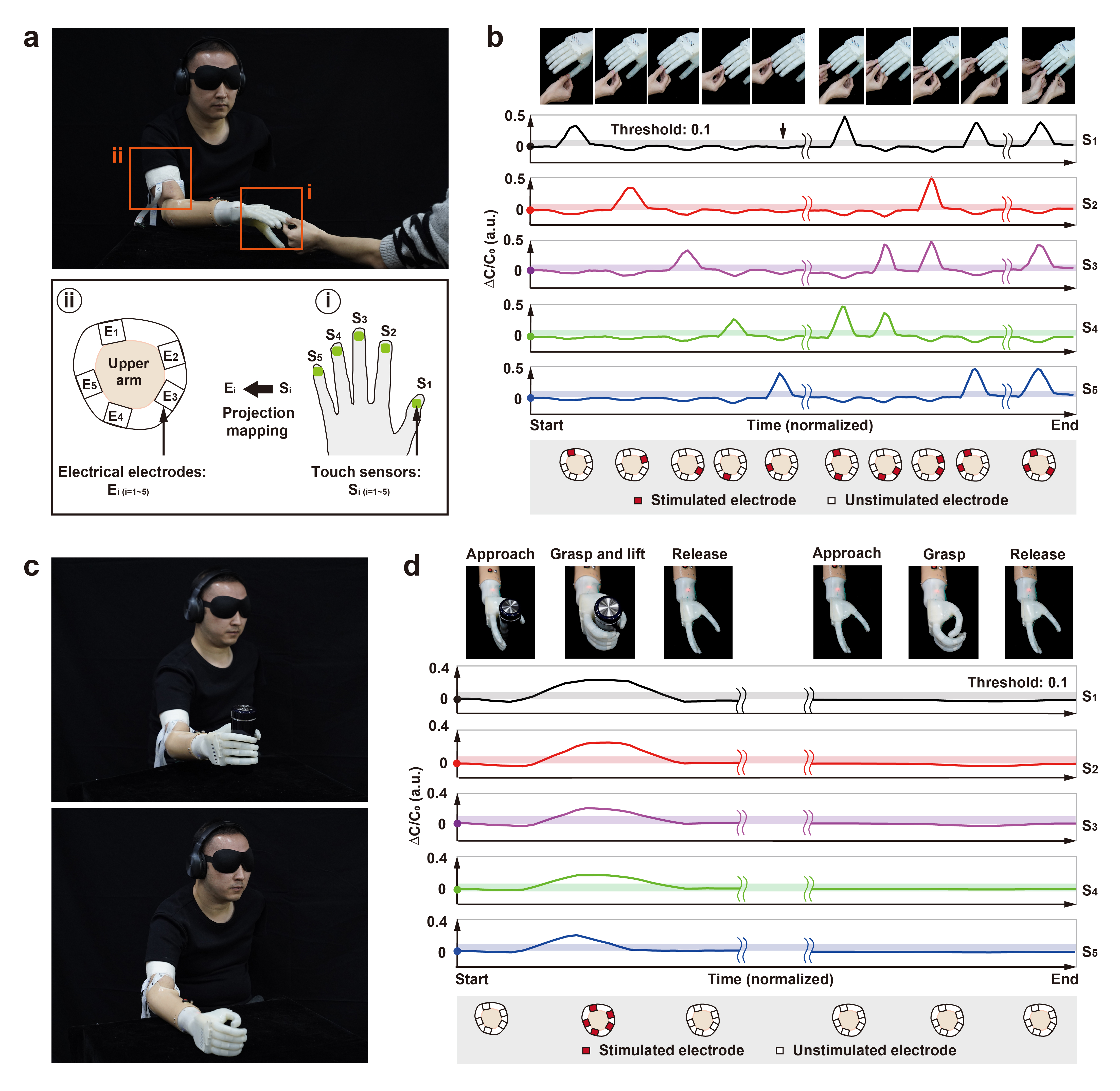
當指尖觸覺傳感器上的有效壓力達到設定閾值時,將觸發(fā)電刺激器產(chǎn)生電脈沖并刺激殘肢肌肉的特定區(qū)域,實現(xiàn)觸覺信號的神經(jīng)反饋。在視覺-聽覺屏蔽的交互實驗中,隨機按壓軟體神經(jīng)假肢手的五個手指,截肢受試者可以準確分辨出任意單個或多個被按壓的手指。實驗結果表明,結合肌電控制和觸覺反饋可實現(xiàn)軟體神經(jīng)假肢手的閉環(huán)控制。此外,通過對電脈沖的頻率與壓力傳感器相對電容變化量的編碼映射,截肢受試者可以恢復分級觸覺感知能力,實現(xiàn)對不同尺寸抓握對象,如不同直徑柱體的識別與分辨。
論文報道了一種集成肌電控制與觸覺反饋的軟體神經(jīng)假肢手,能夠幫助截肢受試者恢復多種手部靈巧操作功能、觸覺感知反饋和閉環(huán)控制能力。其模塊化的設計可實現(xiàn)高效的迭代設計、制造和控制。與商用剛性假肢相比,軟體神經(jīng)假肢手具有諸多優(yōu)勢,如固有的順應性、輕便、低成本以及嵌入式的柔性觸覺壓力傳感等。研究采用更先進的肌電解碼算法和感知反饋方法,有望進一步提高軟體神經(jīng)假肢手的性能。研究工作為下一代柔順、輕便、低成本的類生物體假肢技術的發(fā)展提供新的思路和方法。
論文研究工作得到了國家自然科學基金、上海市科委“科技創(chuàng)新行動計劃”等科技計劃項目的支持。
論文鏈接:https://www.nature.com/articles/s41551-021-00767-0
相關報道:https://www.nature.com/articles/d41586-021-02238-7
 學院OA系統(tǒng)
學院OA系統(tǒng) jAccount登錄
jAccount登錄




































 地址:上海市東川路800號上海交通大學閔行校區(qū)機械與動力工程學院
地址:上海市東川路800號上海交通大學閔行校區(qū)機械與動力工程學院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn