近日,第17屆智能機(jī)器人與應(yīng)用國際會議(The 17th International Conference on Intelligent Robotics and Applications, ICIRA2024)召開,會上頒發(fā)2024年International Journal of Intelligent Robotics and Applications(IJIRA)最佳論文獎(jiǎng),機(jī)器人研究所熊振華教授團(tuán)隊(duì)完成的“Autonomous Navigation of Mobile Robot in Radiation Environment with Uneven Terrain”論文獲此榮譽(yù)。論文作者為碩士研究生黃穎、時(shí)曉雨及博士研究生周研,熊振華教授為通訊作者。

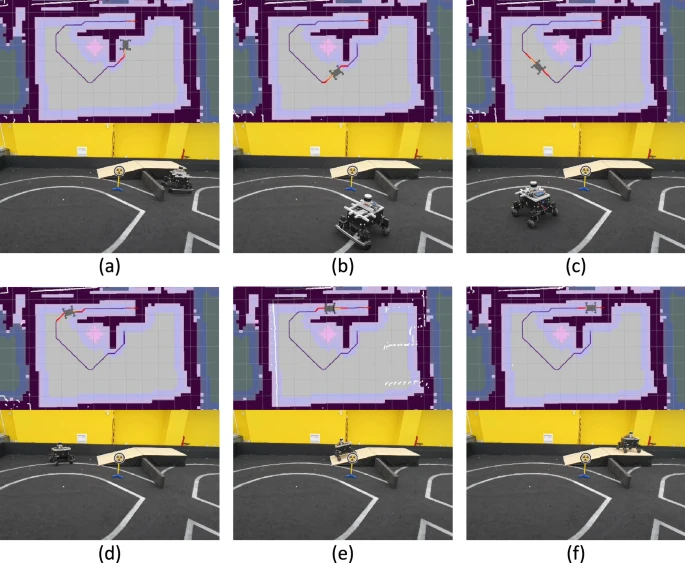
論文針對復(fù)雜涉核環(huán)境,提出一種移動機(jī)器人的自主導(dǎo)航方法,包括以輻射代價(jià)地圖和坡度代價(jià)地圖的多層代價(jià)地圖作為路徑規(guī)劃器的輸入,運(yùn)用一種綜合考慮路徑、輻射和坡度影響的A*算法來構(gòu)建全局路徑規(guī)劃器,實(shí)現(xiàn)了一種多傳感器數(shù)據(jù)融合算法用于機(jī)器人的實(shí)時(shí)定位和運(yùn)動控制,并通過仿真和實(shí)驗(yàn)驗(yàn)證了所提方案的合理性。研究成果為復(fù)雜核事故環(huán)境下移動機(jī)器人自主導(dǎo)航提供了新方案,旨在延長機(jī)器人工作壽命、提高機(jī)器人工作效率和運(yùn)行可靠性。
International Journal of Intelligent Robotics and Applications(IJIRA)是由施普林格·自然集團(tuán)(Springer Nature)出版的ESCI英文國際期刊,每年出版四期,旨在傳播智能機(jī)器人領(lǐng)域的突出科研成果,探討其未來應(yīng)用前景,幫助人類社會應(yīng)對能源、交通、人口老化、醫(yī)療保健、環(huán)境和安全等方面的挑戰(zhàn)。
論文鏈接:https://link.springer.com/article/10.1007/s41315-022-00255-x



上海交大
機(jī)械動力學(xué)院



上海交大
機(jī)動本科教務(wù)辦



SJTU機(jī)動研教辦



上海交大
機(jī)動校友辦



上海交大MEM



SJTUME基礎(chǔ)實(shí)驗(yàn)與創(chuàng)新實(shí)踐



SJTUME錘錘



上海交大
機(jī)動研究生會



ME微紅旗



ME礪遠(yuǎn)學(xué)術(shù)



SJTUME職業(yè)發(fā)展中心
 學(xué)院OA系統(tǒng)
學(xué)院OA系統(tǒng) jAccount登錄
jAccount登錄




 地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機(jī)械與動力工程學(xué)院
地址:上海市東川路800號上海交通大學(xué)閔行校區(qū)機(jī)械與動力工程學(xué)院 郵編:200240
郵編:200240 Email:sjtume@sjtu.edu.cn
Email:sjtume@sjtu.edu.cn